The following is an exchange of text messages with Roger Thisdell, a 26 year old accomplished meditator. He claims that this year he finally broke through into abiding in what he describes as an entirely new category of experience that matches the descriptions of classical Buddhist 4th path.
1) Utter centerlessness: no watcher, no sense of a watcher, no subtle watcher, no possibility of a watcher. This is immediately obvious just as color is to a man with good eyesight as the old saying goes. Thus, anything and everything simply and obviously manifests just where they are. No phenomena observe any others and never did or could.
2) Utter agencylessness: meaning no agency, no sense of doing, no sense of doer, no sense that there could be any agent or doer, no way to find anything that seems to be in control at all. Whatever effort or intent or anything like that that arises does so naturally, causally, inevitably, as it always actually did. This is immediately obvious, though not always the forefront of attention.
3) No cycles change or stages or states or anything else like that do anything to this direct comprehension of simple truths at all.
4) There is no deepening in it to do. The understanding stands on its own and holds up over cycles, moods, years, etc and doesn’t change at all. I have nothing to add to my initial assessment of it from 9 years ago.
5) There is nothing subtle about it: anything and everything that arises exhibits these same qualities directly, clearly. When I was on the third path, particularly late in it, those things that didn’t exhibit these qualities were exceedingly subtle, and trying to find the gaps in the thing was exceedingly difficult and took years and many cycles. I had periods from weeks to months where it felt done and then some subtle exception would show up and I would realize I was wrong yet again, so this is natural and understandable, and if someone claims 4th as I define it here and later says they got it wrong, have sympathy for them, as this territory is not easy and can easily fool people, as it did me many, many times over about 5 years or so. However, 4th, as I term it, ended that and 9 years later that same thing holds, which is a very long time in this business.
There are other aspects that may be of value to discuss at some other time, but those are a great place to start for those who wish to claim this. If you truly have those, then perhaps we can talk about a few other points that are less central and essential.
[Links added to aid reader’s comprehension – lightly edited for clarity]
In the beginning… Roger joined a private group where we discuss consciousness and started to get familiar with the vocabulary of the Qualia Research Institute (e.g. discussing meditation in terms of valence). He then posted this video, which caught my attention:
Where he claims that “Pleasure as a positive, as an actual added experience, does not exist. It certainly does not exist how a lot of us think it does … [whereas] negative valence experiences do exist as contractions.”
Andrés! This is Roger Thisdell […]. Thanks for giving me your number.
Do add me to the Phenomenology Club. That sounds like my jam! Cheers!
Andrés:
Excellent! Will do! 🙂
[…time…]
Roger:
Hey Andrés, it was great to hang out online last night and hear your explanations. A bunch of you are really elite thinkers. I’m inspired to learn how to speak more of your qualia language.
I would love to get into the topic of paradises with you. You seem to really sing their praise.
I said yesterday that I hold the view that actually what is most desirable is just the elimination of negative valence. As someone who frequently has cessations (when consciousness blanks out for a moment) where there is no subjective experience (no negative, no positive valence) in my book this is good enough. My thinking is also informed via complete ego death experiences in which there is still consciousness but no judgement on any part of experience (bad or good). At a local individual level these are the most desirable states. Out of all the states I have experienced (including bliss trips, jhanas, 5-MeO, MDMA, staring into the eyes of a lover without insecurities, laughing fits 🤣) if I had to choose a state to be in permanently it would either be cessation or ego death. I may have curated my brain too much to a Buddhist view and my level of emptiness insight is well entrenched, so that it is hard for me to really believe the ultimate good is to keep the cosmic consciousness party going and fueling it with positive valence.
I think that while consciousness is online we better make the best out of it and try to exist in as few low negative valence states as possible and help all sentient beings with this as well; all the while the positive valence that comes along is merely instrumentally valuable, like a compliment or added bonus.
For example if you are hungry it is nice to eat something tasty. But if you were never hungry in the first place then who cares how tasty something is – don’t need it 💁♂️ (this may be my strongly consolidated non-attachment showing).
I guess what I’m really asking is: can you convince me to intrinsically care for paradise states? I do believe I have experienced what you are referring to as paradise states, but maybe I just have too much non-attachment for them to think they are the goal/prize.
(apologies for being long-winded 🙏)
Andrés:
Perhaps:
You lost the ability to get excited about future experiences. You learned this because you were taught and you practiced techniques that associate being excited about the future with dukkha. Alas, the hedonic theories around the time of Buddha were incomplete and as a consequence a lot of the claims and teachings underfit reality (meaning that they generalize too much). In contrast, it turns out that there are a manifold of ways of experiencing excitement about the future in an epistemologically clear way and no delusions. More so, with that orientation one can see more clearly larger parts of the state-space of consciousness as one is not inhibiting them. I know you have experience with high valence states. But I suspect you have deconstructed a lot of the microcognitive apparatus that allow the insights coming from the reality of their existence from propagating across the entire nervous system.
Just as lack of awareness about e.g. cluster headaches phenomenology can give you the impression that reality has no stakes, so does acute lack of access to the ultra-positive realms. I think for many, Buddhism has a certain effect in how one conceptualizes such experiential realms after the fact that perhaps is not quite in tune with how they truly were. Interestingly, one could here examine Buddhism as an aesthetic itself, and renunciation as a kind of Soulmaking, where under the hood one is still pursuing a kind of high-dimensional meaning qualia of positive valence. Which takes me to:
Rob Burbea’s Soulmaking talking about how exploring not exhaustively breaking down dukkha always but letting a bit of e.g. Eros/passion for reality opens up new ways of seeing that recontextualize Buddhism. Not that we shouldn’t get rid of dukkha, of course. But it’s good to see the underlying aesthetic influences on how one generalizes about reality based on one’s experience.
What do you think? 😄
Thank you for joining! And also for sharing your thoughts. 🤠👌
First of all, I am so impressed with Burbea. His lectures were incredibly useful for me while learning the jhanas. And now I’m picking through his book ‘Seeing That Frees’.
I think his ontology and how he builds on Buddhism is sophisticated and gorgeous.
Reminds me of a remark about Hemingway, by his grandson – he quit journalism to dedicate himself to fiction because he was more interested in truth than facts. I relate this to Soulmaking in a way.
I love his notion of skillful fabrication. But it seems like it’s a compromise in a way. We can’t fully live without self, and thoughtforms, and conceptual frameworks, and so, while we are alive and have them, let’s learn to use them skillfully/beautifully. I’m on board! 🚂
Re your 2nd point: I would add that a lack of awareness of the existence of cessations, or Nirodha, or ego death experiences is another topographical blind spot which prevents people from making a more comprehensive assessment of what is most desirable. (I know that many people who say they’ve experienced ego death, when I enquire about it, it turns out to be more of just a partial ego loss experience, and not the full annihilation). I suppose we really need those who have deep expertise in bliss states and dukkha-less/unfabricated states to compare and contrast.
For what it’s worth, and to give you more a sense of my bias, I would claim to be someone who has explored a wide range of state-spaces: from suicidal depression, to psychosis-like damnation bad trips, to K-holes, to peak experiences, and now as of 21st of May [2021] I’m claiming Frank Yang-style MCTB [see: Scott Alexander’s book review] 4th path permanent abiding in centreless consciousness (IDK what that says about my nervous system and fully propagating insights as you mentioned).
Hands down 🙌, this is the best shift in my life that has ever taken place without a doubt (I thought stream entry was good, but this is another magnitude). My hedonic set tone is persistently so high. I’m often walking around smiling for no apparent reason. 11/10 I recommend this.
And 4th path gets you an ability to adopt a new perspective where you simultaneously see the Yin and the Yang and vice sera (emptiness is form and samsara is nirvana). It’s all one place, there is not out. All the while, still we quite obviously make value judgements between states. I know you speak of hellish corners of consciousness that shouldn’t be touched. And so, although we can/should adopt flexibility of perspectives on aesthetic frames (as Rob speaks about, which is helpful) and see value in many different views as best as we can… must we still do the hard job of really judging what is best? What is most desirable? (to talk from a metamodern perspective).
Ultimately, I still come down on: lights out unconsciousness tops everything 🤷♂️ [emphasis mine]. Getting all beings to Parinirvana would objectively be preferable for all beings rather than keeping the play going – if such a plan is possible or sensible or sensical even.
It’s funny though, at some point I think it may just come down to some split difference in intuition among people (perhaps that difference can be reconciled somehow). For me this was apparent when I hear from Kenneth Folk vs. Culadasa. Kenneth holds antinatalist sentiments (or he did when I emailed him a couple of years ago and actually asked him) which speaks to a siding with a belief that there is an asymmetry of weighted value between negative and positive valence. While Culadasa seems to emphasize the joyous journey and adventure of life, which may speak to an opposite weighting in favor of the positive valence being worth the negative valence that comes along with it. Certainly not all spiritual roads lead to Rome.
I am very open to the idea that I am missing something though, and I may just need to be led by the hand like a child to these heaven realms for me to change perspective 😇😂
Thanks for engaging, this is fun!
Andrés:
Thank you for engaging! This is super interesting! Let me think about what else I can say 🙂
[…time…]
Total valence vs. pureness of valence: see Principia Qualia pg. 41. It could be that during cessations consciousness disappears and the state literally does not exist in any way. But the states immediately before and immediately after do and have at least a tiny bit of information so they are mixed valence states. Yet, perhaps they are massively positive valence on net.
An alternative view is that unconsciousness is still ‘real’ in a way, in which case we could think of it as consciousness but with no content whatsoever. But it’s still there. The analogy would be like combing a vector field in a torus. Most states have the vector field collide with itself and therefore feel less than perfect valence (due to [the Symmetry Theory of Valence, aka.] STV). Only when the field is completely combed without any self-collisions (which would not be possible in a sphere) you get perfect positive valence. And although there is no information encoded in the field, it still exists just as it did before. There’s just nothing to report.
In that case paradise could actually still exist. Meaning, higher and more refined versions of this kind of experience. In particular, we could look for other mathematical objects where the field can also be combed perfectly. They would then be strangely a different kind of ‘unconsciousness’ perhaps capable of fitting more energy and higher dimensions. Still, they would have maximum positive valence.
What do you think?
Oh, I also forgot if I’ve asked you whether you’ve tried 5-MeO-DMT and how it compares to your new baseline.
Ah, yes, I see the kind of framework you’re thinking from now – anti-symmetry, symmetry, and asymmetry.
From Principia Qualia pg. 39: [paraphrasing] “…if we take our hypothesis and apply it to IIT, and then we attempt to maximize pleasure/symmetry, consciousness/[phi] drops very rapidly.”
All the way to the point that maximum pleasure entails no consciousness??? [emphasis mine]
I don’t have a lot of experience with 5-MeO. I only did it once at about a 6mg range.
My impression of 5-MeO was that it had a visual brightening effect somewhat similar to the 4th Jhana. And there was that psychedelic mirroring effect with eyes open. It also had the reduction of conceptual understanding that comes when you get into 8th [Jhana]. I interpret that as a significant down-regulation in top-down information processing??
5-MeO has the sense that it’s going somewhere, moving towards something, while the effects build and then dissipate. Like it’s growing into something (I guess this is before a peak breakthrough – which I didn’t have).
My current consciousness abode isn’t going anywhere. There isn’t a sense that things are building towards something. It has a forever ‘this is it’, locked-in quality. Like a somewhat superposition of emptiness and fullness simultaneously. (Before 4th path I always felt like I was flickering between form and emptiness, now the two cohabitate the experiential space at the same time).
5-MeO also seemed very hedonically volatile; like any subtle thought or movement could disrupt the peace.
Meanwhile my current state is super unperturbable. In the past 2.5 months I haven’t found something that has rocked my well-being.
A couple of weeks ago I listened to an interview of a North Korean defector tell her story of starvation and human trafficking and for a good 30 minutes I was crying at this tragedy. But it was crying from a place of still really high well-being. I didn’t feel like I was suffering and I didn’t mind that crying state at all. (Which is quite weird, I suppose).
In my normal state now, there are no more papañca attacks. Thoughts don’t capture the mind like they used to.
And another thing I love about this new state is that I still have all my cognitive functions intact and I can operate in the world totally normally – which can’t be said about being on 5-MeO.
I feel super sober; while on 5-MeO I don’t believe you do (if I remember correctly).
I would say I prefer my new baseline to what I experienced on 5-MeO because of the lack of volatility and practicality of still having my intellect on hand, all the while with the constant sense of ‘this is it’ and high, high well-being.
[…time…]
Roger and Andrés have a video call:
We discussed a number of things: his meditation journey, his thoughts on various philosophies, exploring QRI frameworks, and his interest in music. Curiously, Roger said that unlike other people who spend a lot of time in meditation healing traumas and processing past experiences, he was able to largely just focus on progress on the path. This, along with a very rigorous and consistent practice, is why he got to where he is at so early in life (26 years old).
One of my main interests in the discussion was to flesh out how 4th path states/traits and the Symmetry Theory of Valence (STV) were connected. If I recall correctly, there were three main ideas connected to this topic I shared with him:
Discussing the “levels of consciousness” experienced on a psilocybin trip and the way they might mirror some of Frank Yang’s descriptions of the levels of consciousness on the path to awakening,
A model of equanimity I’ve been developing where impedance matching is a key ingredient, and
The difference between a “recipe” of a state or transformation of consciousness and its “review”
Let’s briefly elaborate on these topics.
(1) Frank Yang talks about undergoing a meditative process with the following stages: (a) standard sense of self, (b) awareness of awareness, (c) God/Oneness/Being/Non-Duality/Self, (d) Emptiness/Non-Beng/Uni-Locality, (e) Neither Being Nor Non-Being, and finally (f) Enlightenment.
What makes his descriptions so incredible is that he provides very raw and unfiltered phenomenological accounts of the process without really trying to force them into any pre-existing framework. From the point of view of the mission of QRI this is very valuable. In particular, it allows us to examine his process of transformation with the framework of Qualia Formalism: we ought to ask, not what kind of spiritual/mystical/transcendent process is going on here (which will certainly take us nowhere), but rather, wonder if we can cast his descriptions in terms of *structural changes to the field of awareness*. For example, Frank talks about “the screen of God” that becomes apparent in (c), where waves of energy seem to travel without resistance across one’s experiential field. He also talks about phase transitions (similarly to Shinzen Young, he talks about a process of liquefaction and gasification of the field of awareness). If, as we believe at QRI, valence is a structural property of experience, these transformations would have profound effects on one’s sense of wellbeing. So, the reason why “the screen of God” is a profound experience is not because you literally merge with a divine being (which might not be possible if we assume indirect realism about perception), but because the field of awareness is now in a phase that allows an entirely new level of efficient stress dissipation.
I shared with Roger some details from a particularly interesting psilocybin trip report that described rapid phase transitions between (what appears to be) several of the levels Frank describes. In particular, “the screen of God” state seems to have the capacity to stresslessly locate sensations without generating reverbarions with a represented “small self to which those sensations belong”.
(2) In turn, this led to discussing a new model (we haven’t really touched upon in QRI publications yet, but which is coming) of equanimity based on experiences I had during a two-week retreat earlier this year (see: Buddhist Annealing). This model has at its core the idea that equanimity is a mental tool that increases impedance matching between nervous system harmonics. Ask yourself: why is it that when you pluck a guitar string it sounds louder if it is connected to a guitar? It is not, as many would think, that the “resonance box amplifies the sound” (for where would the extra energy come from?). Rather, the energy is the same; what changes is the speed at which it is discharged! The resonance box vibrates and dissipates the energy of the string much faster than the string could on its own (as an aside, this is exactly why you can sustain a note for so much longer in an electric guitar). We could thus postulate that a lot of inner dissonance comes from resonance in the nervous system that has no means of dissipating its stored stress. To an extent, this is because involuntary subliminal contractions in our nervous system compartmentalize and modularize its components. Equanimity is the practice of relaxing those contractions, and thus slowly allowing the nervous system to undergo a search process where it finds structures that can resonate with the stored stress, and in turn allow it to dissipate faster. More so, over time, you entrain (and rewire!) the nervous system to become highly efficient at stress-dissipation. Dissonance is still there, but it “unfolds” and gets “metabolized” so fast that it barely counts as suffering. Highly annealed nervous systems are powerful stress-dissipation engines!
(3) Finally, we also discussed the idea that there is a distinction between the “recipe” of a state of consciousness and its “review”. A recipe is the steps you take in order to achieve a certain state (or transformation) of consciousness. A review is instead an account of what the resulting state feels like. Just as the instructions for baking a cake are quite different from a Chef’s review of what the resulting cake tastes like, we can expect that meditation instructions (e.g. focusing on the three characteristics) will not necessarily reflect the nature of the transformations of consciousness that result from them. Thus, while a lot of the meditative path is nominally about “renouncing” the pursuit of high-valence states of consciousness (and thus avoid the pleasure paradox), the result is nonetheless a state of consciousness that is high-valence in nature! Paradoxical? I don’t think so. The confusion is merely the result of conflating recipe and review.
Thus, we can still apply valence theories to states of consciousness that are allegedly beyond valence. Frank Yang, for example, seems to resonate a lot with STV. See his December 2020 interview at The Stoa. There (and in other videos) he describes “God mind” consciousness as a very positive experience, which is very symmetrical but not perfect. But his true awakening is perfectly symmetrical (in the realm of space, observer, and sense of time, even if not in content). His experience became like a “hologram that has no center”. Quote:
“Have you seen those illustrations of a sphere or a circle, where one point connects to all of the other points? […] if you wanted me to describe my day to day, moment to moment, experience, well, it’s pretty symmetrical. As in, there is no center to experience. There is hearing but no hearer; there is just the seeing, there is no seer; on thinking there is just thinking and no thinker. It’s not, like, processed or filtered through a subject in the center. And it’s very immediate in the sense that all of the sensations, all 360 degrees, are synched up to themselves, without any delay, 24/7. And all the sensations, where there is body, you know sight, sound, thoughts, emotions… they are all on equal footing to each other […inaudible…] in symmetry, and that is for me an aesthetic experience. I would say a suffering mind is a mind that isn’t symmetrical. If your mind is asymmetrical, it means it’s defiled somewhere. So for me aesthetics runs in all different kinds of domains, not only on the perceptual domain, not only on the visual aesthetics domain, but even on the emotional and how you think.”
Yes, God Mind (left) is good, but have you tried no-self (right)? It is so much more symmetrical!
As we’ve discussed before, the homogeneity of phenomenal space and time might be a very large component of what accounts for positive valence. And what Frank is describing here suggests that’s the case. Disturbances in the attention field lines and the saliency of specific components of a mind can break the underlying symmetry of the phenomenal space and time of the resulting experience. Anxiety, for example, in this paradigm is described as unpleasant because it involves the bubbling up of low-level prediction errors causing “attention pinches” across your experience, and thus disturbing the free-flow of energy that would exist in a homogeneous field. Prediction errors are not inherently unpleasant; they are unpleasant only to the extent that they cause asymmetries in your field of awareness!
Frank Yang also says that his big awakening felt like a “quantum jump”. It makes sense that a strong anti-fragile attractor for a new network topology would be self-reinforcing (a new lowest-energy state, metaphorically speaking, perhaps akin to a false vacuum collapse inside one’s mind!). Again, this is all very compatible with valence structuralism, if not STV.
Roger said that he will have to think about all of this. In the meantime, he shared with me some (amazing!) pictures he made to illustrate how his field of awareness has been transformed with meditation over time. Like Frank Yang, he identifies several discrete phase transitions. These are: (a) standard perception, (b) The Witness, (c) Big Mind, (d) No Self, and finally (e) No Self & Centreless Awareness (4th path!):
Considering more what you said about impedance matching and adding resonance to experience:
Perhaps this is merely an analogy, but still: consider the tautness of a spider’s web. If a fly lands on it, at one part, the whole web will shake and the energy will transfer throughout in such a way that the spider can locate where on the web the fly landed. If the web is too taut then the energy of the fly landing won’t dissipate far enough for the spider to receive the information. However, if the web is too slack the fly could just break the structure of the web.
It might be interesting to consider why spiders build webs with a centre point and not as a straight or criss-crossing lattice.
So to relate this to consciousness and metabolizing stress… I would say my consciousness now feels like it’s more taut and lattice-woven rather than spider web-shaped with a middle [emphasis mine]. So this means when a stress point is activated somewhere in the experiential space, its energy doesn’t ripple as far out as it would have before, thus not being as disruptive.
And if we aliken the spider on the web to the epistemic agent, if he is situated on one spot and for all goings-on on the web to be known their information must travel to him, then the web must be not too taut so that all the ripples can reach him and he knows what’s going on. The problem with this set-up is that it means that knowing requires instability.
However, if we do away with the spider (a single point considered the epistemic agent) and make it so that the knowledge is attributed to the web itself, then the web can afford to be much more taut/less shaky/more robust, causing less negative valence.
So in some way I could say my experience (centerless consciousness) is more taut in this way, but this tautness doesn’t feel rigid or stiff, but rather very airy.
Indra’s net can have too much slack in it, if it’s not sewn together tightly and uniformly.
Pre-Awakening: The mind uses a fictitious “self-as-epistemic-agent” in a field of awareness that has slack and vibrates in unpleasant ways in the process of integrating information. The field of awareness relies on a network topology that is suboptimal for efficient stress dissipation.
Post-Awakening: The mind lacks any kind of center or self-as-epistemic-agent. The field of awareness is tout and extremely efficient at stress dissipation. The network topology has permanently changed to a far more symmetrical and regular configuration.
Just for interest’s sake, and I don’t know if this bears any significance, but I’m ambidextrous by the way.
I know symmetry plays a major role in your hypotheses of valence and such.
In some way, I have thought that not having such a prioritization and weightiness to just one side of the body has balanced out my experience and perception (perhaps more than others), I’m not sure.
R
(As of the 23rd of November 2021, Roger states that he continues to be in the blissful state of centreless consciousness)
Commentary by Andrés, after the fact:
This conversation (and further exchanges I may share in the future) has reinvigorated my quest to describe states (and transformations) of consciousness in terms of changes to the network topology that underlies our field of awareness. Enlightenment might be described in “mystical” ways, but this could be simply due to lack of an adequate formal conceptual framework to make sense of it. But perhaps STV, impedance matching, and efficient stress dissipation through radical network topology reorganization without compromising self-epistemics could take us much further than before in this quest.
Also, if Roger was able to achieve these transformations at the tender age of 26, what is stopping the rest of us from doing the same?
If I were to add one thing to the wish-list, I’d say (in unison with people like Nick Cammarata and David Pearce): if we could have access to MDMA-like states of emotional wellbeing and empathy on tap, that would be fantastic (for many reasons). Plus, non-addictive real pain relief might very well be right behind the corner. So to revise our (admittedly cartoonish and partial) wish-list for the medium-term future of sentience: “MDMA-like emotional palette, non-addictive pain relief, and physiological Arhatship: The rest is commentary”. See you there, my friends!
Happy Thanksgiving Everyone (including the Turkeys, of course)!
Even with the benefit of enormous hindsight, it is hard to introduce complex numbers in a compelling manner. Historically, we have seen how cubic equations forced them upon us algebraically, and in discussing Cotes’ work we saw something of the inevitability of their geometric interpretation. In this section we will attempt to show how complex numbers arise very naturally, almost inevitably, from a careful re-examination of plane Euclidean geometry.[10]
[…]
Although the ancient Greeks made many beautiful and remarkable discoveries in geometry, it was two thousand years later that Felix Klein first asked and answered the question, “What is geometry?”
Let us restrict ourselves from the outset to plane geometry. One might begin by saying that this is the study of geometric properties of geometric figures in the plane, but what are (i) “geometric properties”, and (ii) “geometric figures”? We will concentrate on (i), swiftly passing over (ii) by interpreting “geometric figure” as anything we might choose to draw on an infinitely large piece of flat paper with an infinitely fine pen.
As for (i), we begin by noting that if two figures (e.g., two triangles), have the same geometric properties, then (from the point of view of geometry) they must be the “same”, “equal”, or, as one usually says, congruent. Thus if we had a clear definition of congruence (“geometric equality”) then we could reverse this observation and define geometric properties as those properties that are common to all congruent figures. How, then, can we tell if two figures are geometrically equal?
Consider the triangles in [fig 23], and imagine that they are pieces of paper you could pick up in your hand. To see if T is congruent with T’, you could pick up T and check whether it could be placed on top of T’. Note that it is essential that we be allowed to move T in space: in order to place T on top of T˜ we must first flip it over; we can’t just slide T around within the plane. Tentatively generalizing, this suggests that a figure F is congruent to another figure F’ if there exists a motion of F through space that makes it coincide with F’. Note that the discussion suggests that there are two fundamentally different types of motion: those that involve flipping the figure over, and those that do no. Later, we shall return to this important point.
It is clearly somewhat unsatisfactory that in attempting to define geometry in the plane we have appealed to the idea of motion through space. We now rectify this. Returning to [fig 23], imagine that T and T’ are drawn on separate, transparent sheets of plastic. Instead of picking up just the triangle T, we now pick up the entire sheet on which it is drawn, then try to place it on the second sheet so as to make T coincide with T’. At the end of this motion, each point A on T‘s sheet lies over a point A’ of T’‘s sheet, and we can now define the motion M to be this mapping A → A’ = M(A) of the plane to itself.
However, not any old mapping qualifies as a motion, for we must also capture the (previously implicit) idea of the sheet remaining rigid while it moves, so that distances between points remain constant during the motion. Here, then, is our definition:
A motion M is a mapping of the plane to itself such that the distance between any two points A and B is equal to the distance between their images A’ = M(A) and B’ = M(B). (22)
Note that what we have called a motion is often termed a “rigid motion”, or an “isometry”.
Armed with this precise concept of motion, our final definition of geometric equality becomes:
F is congruent to F’, written F ≅ F’, if there exists a motion M such that F’ = M(F). (23)
Next, as a consequence of our earlier discussion, a geometric property of a figure is one that is unaltered by all possible motions of the figure. Finally, in answer to the opening question of “What is geometry?”, Klein would answer that it is the study of these so-called invariants of the set of motions.
One of the most remarkable discoveries of the last century was that Euclidean geometry is not the only possible geometry. Two of these so-called non-Euclidean geometries will be studied in Chapter 6, but for the moment we wish only to explain how Klein was able to generalize the above ideas so as to embrace such new geometries.
The aim in (23) was to use a family of transformations to introduce the concept of geometric equality. But will this ≅-type of equality behave in the way we would like and expect? To answer this we must first make these expectations explicit. So as not to confuse this general discussion with the particular concept of congruence in (23), let us denote geometric equality by ~.
(i) A figure should equal itself: F ~ F’, for all F.
(ii) If F equals F’, then F’ should equal F: F ~ F’ ⇒ F’ ~ F.
(iii) If F and F’ are equal, and F’ and F” are equal, then F and F” should also be equal: F ~ F’ & F’ ~ F” ⇒ F ~ F”.
Any relation satisfying these expectations is called an equivalence relation.
Now suppose that we retain the definition (23) of geometric equality, but that we generalize the definition of “motion” given in (22) by replacing the family of distance-preserving transformations with some other family G of transformations.
It should be clear that not any old G will be compatible with our aim of defining geometric equality. Indeed, (i), (ii), and (iii) imply that G must have the following very special structure, which is illustrated[11] in [fig 24].
(i) The family G must contain a transformation ε (called identity) that maps each point to itself.
(ii) If G contains a transformation M, then it must also contain a transformation M-1 (called the inverse) that undoes M. [Check for yourself that for M-1 to exist (let alone be a member of G) M must have the special properties of being (a) onto and (b) one-to-one, i.e., (a) every point must be the image of some point, and (b) distinct points must have distinct images.]
(iii) If M and N are members of G then so is the composite transformation N ∘ M = (M followed by N). This property of G is called closure.
We have thus arrived, very naturally, at a concept of fundamental importance in the whole of mathematics: a family G of transformations that satisfies these three[12] requirements is called a group.
Let us check that the motions defined in (22) do indeed form a group: (i) Since the identity transformation preserves distances, it is a motion. (ii) Provided it exists, the inverse of a motion will preserve distances and hence will be a motion itself. As for existence, (a) it is certainly plausible that when we apply a motion to the entire plane then the image is the entire plane — we will prove this later — and (b) the non-zero distance between distinct points is preserved by a motion, so their images are again distinct. (iii) If two transformations do not alter distances, then applying them in succession will not alter distances either, so the composition of two motions is another motion.
Klein’s idea was that we could first select a group G at will, then define a corresponding “geometry” as the study of the invariants of that G. [Klein first announced this idea in 1872 — when he was 23 years old! — at the University of Erlangen, and it has thus come to be known as his Erlangen Program.] For example, if we choose G to be the group of motions, we recover the familiar Euclidean geometry of the plane. But this is far from being the only geometry of the plane, as the so-called projective geometry of [fig 24] illustrates.
Klein’s vision of geometry was broader still. We have been concerned with what geometries are possible when figures are drawn anywhere in the plane, but suppose for example that we are only allowed to draw within some disc D. It should be clear that we can construct “geometries of D” in exactly the same way that we constructed geometries of the plane: given a group H of transformations of D to itself, the corresponding geometry is the study of the invariants of H. If you doubt that any such group exists, consider the set of all rotations around the center of D.
The reader may well feel that the above discussion is a chronic case of mathematical generalization running amuck — that the resulting conception of geometry is (to coin a phrase) “as subtle as it is useless”. Nothing could be further from the truth! In Chapter 3 we shall be led, very naturally, to consider a particularly interesting group of transformations of a disc to itself. The resulting non-Euclidean geometry is called hyperbolic or Lobachevskian geometry, and it is the subject of Chapter 6. Far from being useless, this geometry has proved to be an immensely powerful tool in diverse areas of mathematics, and the insights it continues to provide lie on the cutting edge of contemporary research.
[10] The excellent book by Nikulin and Shafarevich [1987] is the only other work we know of in which a similar attempt is made.
[11] Here G is the group of projections. If we do a perspective drawing of figures in the plane, then the mapping from the plane to the “canvas” plane is called a perspectivity. A projection is then defined to be any sequence of perspectivities. Can you see why the set of projections should form a group?
[12] In more abstract settings it is necessary to add a fourth requirement of associativity, namely, A∘ (B∘ C) = (A∘ B)∘ C. Of course for transformations this is automatically true.
Note: QRI‘s Symmetry Theory of Valence (STV) refers to the claim that valence (the pleasure-pain axis) manifests in the symmetry of the mathematical object that corresponds to each experience such that the mathematical features of that object are isomorphic to the phenomenal character of that experience. Using the lens of Klein’s conception of geometry, one could in turn give to STV a strictly geometrical interpretation. Namely, that the shape of one’s experience will be of high valence when it contains geometric invariants. In addition, Noether’s theorem (one of QRI’s lineages, which states that “every differentiable symmetry of the action of a physical system has a corresponding conservation law”) along with physicalismof consciousness suggests that for every symmetry in the mathematical object that corresponds to consciousness there is a corresponding preserved quantity. Thus, one could posit– assuming that the STV is correct– high-valence states might be extremely energy-efficient in addition to feeling good.
We are currently preparing a paper that ties all of these threads together in a way that, we believe, may turn out to have tremendous explanatory power. In particular, this formal account of valence will be able to explain succinctly a wide range of disparate and exotic empirical phenomena such as:
Why phenomenal symmetry during psychedelic experiences is correlated with more extreme valence values.
How and why Jhanas present the way they do, namely, as having:
HP: What exactly is “symmetrical texture repetition”?
JE: Symmetrical texture repetition is just one of many complex visual distortions or alterations which consistently occur throughout psychedelic experiences on substances such as LSD, Psilocin, Ayahuasca, Mescaline, 2C-B, 2C-E and many others.
It can be described as the organization of rough textures within the external environment becoming mirrored repeatedly over its own surface in an extremely intricate and symmetrical fashion that is consistent across itself. This remains at an unchanging level of extremely high detail and visual clarity within both a person’s direct line of visual focus and peripheral vision.
As these repeating textures are generated they begin to give rise to a huge array of abstract forms, imagery, geometry and patterns that are perceived to be embedded within and across the symmetry.
Towel texture enhancement by Chelsea Morgan. Source.
Ice symmetrical texture repetition by Chelsea Morgan. Source.
How it feels like to symmetry-unify from the inside, a case study:
Onion Article Headline 2016: Synesthetic Couch-Texture Not Quite Ready to Merge with Lamp Turned Space-Filling Line System, Says It Needs to Make Itself More Spiky First
Inside Alice’s acid-filled brain today, we are now about to experience for the 6th time or so how various blobs of textures are trying to merge into a coherent super structure. According to local sources, Alice is currently feeling a sense of awe and anticipation as the two big texture clusters in her field of vision are beginning to interact with each other. She is excited to notice that one of them is “calling” the other into it, and giving it ideas on how to “plug in geometrically” with it.
Alice, who reportedly took 160 micrograms of LSD roughly 3 hours ago, narrates how it felt like to make a super-symmetrical system in her visual-kinesthetic field for the 5th time:
“I don’t know if this was the result of alien intelligences messing up with my brain, perhaps a mystical vision about how my ancestors’ experiences connect to mine, or if it was just a strange quantum-entanglement phenomenon in consciousness currently undocumented in the scientific literature, but duude! That one time the couch texture blob made itself more spiky in order to merge with the the space-filling lamp… that was awesome. I look forward to it happening again, but now also including the carpet, walls, and my hands. Leave no texture behind – the resonant symmetry super-structure can make room for everyone.” – Said Alice, in closing.
Psychedelic Symmetry: A Window Into the Information-Theoretic Properties of Experience?
My friend Tim who had not done LSD for many years, responded to this sudden 5 hit dose by going into a state of complete dissociation. He lay down on the forest floor with glassy eyes, muttering “It is TOO beautiful! It is TOO beautiful!” and he did not respond to me, even when I stared him straight in the face. He reported afterwards that he found himself in a giant Gothic cathedral with the most extravagantly elaborate and brightly painted ornamental decorations all around him. This too can be seen as an extreme form of the regularization discussed above. Under the influence of this powerful dose, Tim’s visual brain could no longer keep up with the massive irregularity of the forest around him, and therefore presented the forest in simplified or abbreviated form, as the interior of a Gothic cathedral. It captures the large geometry of a ground plane that supports an array of vertical columns, each of which fans out high overhead to link up into an over-arching canopy of branches. The only difference is that in the Gothic cathedral the trees are in a regular geometrical array, and each one is a masterpiece of compound symmetry, composed of smaller pillars of different diameters in perfectly symmetrical arrangements, and studded with periodic patterns of ribs, ridges, or knobby protuberances as a kind of celebration of symmetry and periodicity for their own sake. There is a kind of geometrical logic expressed in the ornamental design. If part of the cathedral were lost or destroyed, the pattern could be easily restored by following the same logic as the rest of the design. In information-theoretic terms, the Gothic cathedral has lots of redundancy, its pattern could be expressed in a very much simpler compressed geometrical code. In Tim’s drug-addled brain his visual system could only muster a simple code to represent the world around him, and that is why Tim saw the forest as a Gothic cathedral. Under normal conditions, the additional information of irregularity, or how each tree and branch breaks from the strict regularity of the cathedral model of it, creates the irregular world of experience that we normally see around us. This suggests that the beautiful shapes of ornamental art are not the product of the highest human faculty, as is commonly supposed, but rather, ornamental art offers a window onto the workings of a simpler visual system, whose image of the world is distorted by artifacts of the representational scheme used in the brain. The Gothic cathedral gives a hint as to how the world might appear to a simpler creature, a lizard, or a snake, to whom the world appears more regular than it does to us, because its full irregularity is too expensive to encode exhaustively in all its chaotic details. Of course the flip-side of this rumination is that the world that we humans experience, even in the stone-cold sober state, is itself immeasurably simpler, more regular and geometric, that the real world itself, of which our experience is an imperfect replica. In the words of William Blake, “If the doors of perception were cleansed, everything would appear to man as it is, infinite.”
What is the information content of a gothic cathedral? What percentage of it needs to burn down to make it impossible to reconstruct from the ruins alone?
Why Does Any of This Matter? The Deceptively Profound Implications of Psychedelic Symmetry According to Cognitive Scientist Steven Lehar
But there was one aspect of the LSD experience that had me truly baffled, and that was the fantastic symmetries and periodicities that were so characteristic of the experience. What kind of neural network model could possibly account for that? It was an issue that I grappled with for many months that stretched into years. In relation to Grossberg’s neural network, it seemed that the issue concerned the question of what happens at corners and vertices where contours meet or cross. A model based on collinearity alone would be stumped at image vertices. And yet a straightforward extension of Grossberg’s neural network theory to address image vertices leads to a combinatorial explosion. The obvious extension, initially proposed by Grossberg himself, was to posit specialized “cooperative cells” with receptive fields configured to detect and enhance other configurations of edges besides ones that are collinear. But the problem is that you would need so many different specialized cells to recognize and complete every possible type of vertex, such as T and V and X and Y vertices, where two or more edges meet at a point, and each of these vertex types would have to be replicated at every orientation, and at every location across the whole visual field! It just seemed like a brute-force solution that was totally implausible.
Then one day after agonizing for months on this issue, my LSD observations of periodic and symmetrical patterns suddenly triggered a novel inspiration. Maybe the nervous system does not require specialized hard-wired receptive fields to accomodate every type of vertex, replicated at every orientation at every spatial location. Maybe the nervous system uses something much more dynamic and adaptive and flexible. Maybe it uses circular standing waves to represent different vertex types, where the standing wave can bend and warp to match the visual input, and standing waves would explain all that symmetry and periodicity so clearly evident in the LSD experience as little rotational standing waves that emerge spontaneously at image vertices, and adapt to the configuration of those vertices. Thanks to illegal psychotropic substances, I had stumbled on a staggeringly significant new theory of the brain, a theory which, if proven right, would turn the world of neuroscience on its head! My heart raced and pounded at the implications of what I had discovered. And this theory became the prime focus of my PhD thesis (Lehar 1994), in which I did computer simulations of my harmonic resonance model that replicated certain visual illusions in a way that no other model could. I had accomplished the impossible. I had found an actual practical use and purpose for what was becoming my favorite pass-time, psychedelic drugs! It was a moment of glory for an intrepid psychonaut, a turning point in my life. Figure 2.6 shows a page from my notebook dated October 6 1992, the first mention of my new theory of harmonic resonance in the brain.
Martin Ball: Here is what I learned very quickly in working both with 5-MeO-DMT and other medicines during the same time period. First, I noticed this in myself, and then I started looking to see if this was true for other people, and very quickly found that this was true. There is a fundamental distinction: when people go into fully energetically open non-dual states of awareness -and I do qualify it with ‘fully energetically open’ because that is different than, say, a meditative non-dual experience, which I do not qualify as energetically fully open- when someone is energetically fully open and goes into a non-dual state of awareness, what happens is that they always open up with a perfectly mirrored bilateral symmetry, with the left and right sides of the body always mirroring each other. And nothing ever crosses the center line of the body. People move spontaneously or their bodies open up, and their hands may come together, but they come together right here, in the middle along the center line, and then they separate, and then come back together. Then you can see a transition when suddenly someone comes back into the ego. So, they are fully immersed in the experience and their bodies are opened… and then as soon as the ego comes in, there is some kind of break when suddenly the left side of the body is doing something different than the right side of the body.
For people who don’t get all the way to being fully energetically open, you give them a very powerful psychedelic -which again is changing the energetic experience of the body- and you can watch them fight with it, and you will see that there is always some kind of asymmetry taking place in their body language when they are fighting with it. Or if they are still residing in their ego. So I learned very quickly that non-dual states of awareness coincide with balanced bilateral symmetry and the ego almost always functions through some form of energetic asymmetry. Which is perfectly natural! I mean, there is noting wrong with it, I am not trying to criticize it. But for example (I use this example all the time): My glass of water is to my right. Now if I -a subject- become thirsty and I want my water, operating with bilateral symmetry isn’t going to get me my water. My water is over here to the right. So I break into object-subject duality so we can have an interaction between these two different parts of the self. So working with psychedelics for the intention of achieving… not only achieving, but also working out the distortions of the ego, means paying attention to how either symmetries or asymmetries show up within the body.
So this is the challenge that I give people: Take some 5-MeO-DMT, and see how long you can stay perfectly symmetrical within your body. Now, some people can ride it all the way through. And they can do that fairly easily. Many people… I would say the vast majority, can’t. And even those who do, who open up initially and are in this nice bilateral symmetry, you will see, after 10 or 15 minutes, or for some people after 30 seconds, as soon as the ego starts to reintegrate, they start breaking into asymmetries. Now, what can happen is… so the ego itself, and this is also coming out of my own experience, this is not based on anybody else’s model, this is just my own definition of the ego… the ego itself is not a singular thing. It is a collection of patterns of energy. So as we are coming into ourselves, as young beings, what we are doing is learning different -what we perceive as acceptable- ways of engaging our energy.
Believes states of meditation, psychedelic use, and the combination of the two allow for an application of ‘energy’ which is directed towards the brain’s natural harmonics. Coarsely, there is a pattern of energy application -> entropic disintegration -> search/self-reorganization -> neural annealing which is likely to occur in such states.
Believes meditation is a tool which can increase the amount of cognitive control an individual has over his/her conscious experiences.
Believes 4-AcO-DMT is an entactogen, and feelings of empathy and connection with others are desirable.
Believes there is an interaction of ‘top-down stories’ and ‘bottom-up sensory data’ in the mind-brain. Each affects the other, and neither provides a complete account of reality.
Problem of other minds: Believes animals and other complex systems are capable of experiencing conscious states, other individuals exist and are conscious.
Experience
Caffeine/L-theanine:
I took a pill with 100mg of L-theanine and 200mg of caffeine when I woke up at ~7:45AM, in order to wake up at ~8:10AM. Those unfamiliar with the caffeine nap should give it a try.
Dosing/Setting– 12:45
We took our 4-AcO-DMT in capsule form, gathered our ‘tripping accoutrements’ and set off for the local park. It was a beautiful 75 degrees Fahrenheit and sunny, with some welcome clouds in the sky, which seemed placed for our later entertainment. We made it to the park without feeling the effects, making small talk and finding our ‘goldilocks zone’ – the tree with enough shade, ample view, and dry grass. We walked back and forth several times, finding out which side the grass was greenest on. During this 10 minutes, I began to notice the first perceptible changes.
Onset – 13:15-13:45
I described to my partner that I could tell the drug was ‘kicking in’ due to an increase in my proprioception (closest ‘subjective effect’ is probably bodily control enhancement). I then noticed a man lying on his side on the grass in front of us, with his arm and leg out of my view, and next to him lay which I soon realized was a bike. At first blush I thought he was an amputee, and that the device next to him was a walker of some kind. Upon seeing him sit up, I realized I had been mistaken, at which point it could not have been clearer that the ‘walker’ was actually a bicycle (I noted that I was highly aware of the distinction between my perception of the objects and my top-down ‘storytelling’, a welcome surprise I’m sure our Buddhist friends would approve tremendously of). I relayed this to my partner and she laughed, clearly still more certain of her own ability to discriminate. As we lay under a beautiful oak tree in the ‘goldilocks zone’, she commented some discomfort (in the form of ‘anxiety’), and that she felt “too much energy” was getting pumped in with “no place to go”. As a reader of opentheory.net, this analogy was welcome and even surprising in its similarity to my current opinions. I chuckled, although I too was feeling a tinge of anxiety (which I attributed mostly to the 200mg of caffeine I had consumed), increased bodily temperature, and some minor pattern recognition enhancement in the surrounding flora. As I looked to the edge of my visual field, I had the distinct sense of being in a simulated environment. While I have at times toyed with “simulation theory”, I have transitioned to a view more based on an “inner simulator”: that the reality we enjoy is taking place within the boundary of our minds, and these inner simulations exist in separation from one another (similar to Max Tegmark’s ‘bubbles’), with each one representing the mind-independent reality that I believe, but do not “know” exists. In light of this thought, I found myself looking towards the ‘boundary of my external reality’ and explaining to myself that it was in truth actually like looking deeper internally. I noticed (again with more than sober clarity) a change in my belief map.
My partner put on some appropriate lo-fi music and we began to talk as the effects became more pronounced. I felt my experience to be ‘classically psilocin-like’, characterized by intense drifting, pattern recognition enhancement, magnification, color enhancement and geometry similar to that found in ‘trippy artwork’ (internally and externally). When I focused more loosely on my surroundings I had my first brush with scenery slicing, which divided my view of the fountain and hillside opposite us into thirds, each characterized by tapestries of fractal geometry. My partner had been blowing dandelion seeds, which reminded me of a thought I had had on a past trip, that subconsciously she was fulfilling a genetically programmed role in the ecosystem, explained away as a ‘weird urge’. We began discussing the ‘jobs’ other insects and animals had in the ecosystem, and enjoyed their personification. I spouted off some factoids on dragonflies, and their 95% predatory kill rate. She respected the prowess of the beautiful little assassins, and I internally hoped to live in a balanced ecosystem without the predators we now honor. We both noticed that we could see dandelion seeds almost a hundred feet up (magnification, and in my estimation an artifact of our mental entrainment at the time). My partner went to the bathroom in the art museum nearby, and I took 2.5 minutes to meditate, using a silent mantra technique. I experienced beautiful 8B geometry in this state, a truly profound experience. When she returned, we saw a young boy playing with dandelions in front of us. He was so purposeful, so confident, and so apparently random in his behavior. My word choice in describing him (in hushed tones, so as not to disturb his work) revealed a greater availability of infrequently-used words in my vocabulary, and some increased sense of humor. My partner commented that she thought the whole thing to be fake, and this label seemed to cause an increase in my acuity enhancement and color enhancement of the scene (again, I was highly aware of the influence of the ‘top-down story’ on my experience). To me, it also appeared in some ways “not real”, but I thought the two of us had a very different sense of the concept.
I too needed to relieve myself at this point, and decided to take the adventure towards the bathroom, listening to the Johns Hopkins psilocybin experiment playlist on Spotify along the way. I will (for the sake of brevity that I am otherwise flouting) focus only on the seemingly pertinent detail of how I received directions to the bathroom. My partner described the sequence of steps and potential pitfalls to me, and I had an extraordinary ability to visualize the path I eventually followed. My visualization skills in general were extremely heightened, and I noticed I could imagine quite easily and accurately envision how my scenery would change when I moved to a different position (e.g. sitting to lying down).
Exploration: ~14:45-15:45
At this point we both were reporting intense cognitive euphoria (as well as spiritual euphoria). We decided to pack our things and make a trip to expend some of the boundless energy we had in our possession. We journeyed to the sculpture garden behind the museum, and I began to describe the chemical differences between psilocybin and psilocin as my partner and I basked in the glorious shade of the trees there (to which we both felt intense connection). I found that in the sculpture garden I had a greatly increased appreciation for art, and especially the symmetry and proportion found in the sculpture and museum itself. Combined with my feelings of intense well being and spiritual euphoria (which felt augmented by the artwork), this amounted to a point in favor of the Symmetry Theory of Valence. I also noticed cracks in the unity of my conscious experience, where locally bound objects seemed to separate (the analogy I could find was separate “virtual environments” a la whonix), which also engendered in me a type of pleasure I cannot find in the “Subjective effect index”. This may be an area of further examination for the Qualia Research Institute. We enjoyed a blissful walk in the park, featuring feelings of intimacy with children, pets, and ducklings. Of note here was what I felt to be an enhancement of my working memory, as borne out by the following observations: I again had higher availability of vocabulary and terminology in conversation, I was able to juggle rocks more effectively while walking (and felt that during my juggling I was simultaneously apprehending more objects – this was again pleasantly accompanied by increased reflective intelligence that allowed gave me the felt sense of 8B geometry without the visuals). I threw a rock in the stream and found that I could apprehend each ripple simultaneously, and my qualia decay function was much fatter as well. Hmmm, maybe there are some beneficial computational properties of consciousness! We sat on a bench, as I felt the intense urge to exercise physically (specifically to climb a tree, but that was a bit conspicuous). Instead, we looked at a goose and talked about memetics. We marvelled specifically about Dr. Seuss, and how his thoughts had taken root, despite his distasteful personal tendencies. I began to think about the cultivation of plants, and how we tend to use hypotheses and heuristics to guide advances in the rapid evolution, wondering if the same could be done with ideas.
I found myself capable of simultaneously ‘holding in my attention’ each ripple as I cast a stone in the water. (image source)
Home
*Skip home journey, where much of the conversation centered around the responsibilities of pet ownership* 16:30-17:30
We found ourselves at home with the welcome company of a close friend. We relayed some of our experiences, and I felt the onset of some fast euphoria – there were simply too many things I wanted to do – feel water on my hands, do yoga, eat food, smoke marijuana, have sex. I considered how wonderful it would be to restructure the human cognitive reward architecture around health, knowledge of which could be researched, stored and relayed via artificial intelligence. More simply put, as I consumed an entire family-size amount of Tostitos Hint of Lime chips (feeling gustatory and olfactory enhancement), I wished pleasure mapped 1:1 to health. We did some yoga, ate some food (I found sociability enhancement with the delivery man) and we again basked in the glory of the weather and natural environment, taking comfort in each others’ arms. I noticed multisensory magnification and acuity enhancement, finding that I could hear and see elements of nature that usually were unavailable to me, such as the sounds of distant insects and birds, and the ability to see bits of dust floating far off in the sunlight. The birds above drew my attention to my frame rate enhancement, as I could easily watch their wings flapping each time, even from a distance. I could also extract more information from an amorphous reflection in a car door, with the feeling that I was “looking through it” to a slightly more misshapen world. We saw a bunny (“awww bunny!!!”) and had an interesting exchange:
Me: “You know, when I look at that bunny I think about the algorithms going through it’s head – eat blade -> look for next blade -> check for predators -> eat blade -> ..”
Her: “Yeah, that sounds like something YOU would think. I just like to think he’s so excited every time he sees another blade, like it’s the first time every time. That would be cute.”
Me: “Well actually, those could both be true. I’m just talking about the ‘program’ – it could be implemented any way you like. I really have no idea how they feel when they see the next blade of grass, but I hope you’re right. In terms of it being the ‘first time’, he could be like Clive Wearing, on a perpetual refresh.”
Her: “I guess we’ll never know what it’s really like.”
Me: “I don’t know about that.”
Really, we’re just talking about Marr’s theory, but it was interesting to see a real-life example. I was discussing his algorithmic level of analysis, while she was pointing to potential features of the implementational level. Makes me think about how virtual and augmented reality could be such wonderful tools for education. As someone who had thought about his theory often, it was also interesting how this exchange affected me phenomenologically: I felt now like I understood it. I definitely think understanding clearly has qualia-properties (not a very bold statement), and also important computational properties (ahem). I certainly think I can “do more” in terms of analogizing etc. with concepts I understand, and yet I find that understanding likely boils to a feeling. I have had this issue ever since reading John Searle’s Chinese Room thought experiment and thinking it was positively moronic.
As we were talking, I found that I had heightened coordination and dexterity in playing with my pocket knife, something I often do when deep in thought. I considered how it could be a use of some of the ‘excess mental energy’ I had been accumulating, and how the increase in neuroplasticity that Paul Stamets swears by could be playing a role as well.
Intimacy – 18:00-19:00
We vaporized some marijuana (~0.125g each – I commented on how the Pax 2 would eventually come equipped with it’s own brain) and went inside to enjoy a shower and cuddling together. Before our shower, she commented that the water was too cold, and I joked that the whole day was ruined. Yet in that moment, I felt none of the ecstacy which so permeated our day, and so I thought once again that empty individualism had such merit. I had intended to experience the feelings of ‘oneness’ commonly associated with 4-AcO, and wasn’t disappointed, feeling at times as though I was touching my own body when I felt hers. Point in favor of open individualism. For unimportant reasons which I label “boundaries”, I’ve chosen to keep the rest of the details of our intimacy to myself…
Concluding remarks:
There is much more I could write, and yet there are only a few pertinent details of our trip that I’d like to share:
We smoked some additional marijuana, which ended up overpowering the influence of the 4-AcO as the trip came to a smooth stop (there were none of the feelings of depletion or dejection I associate with other compounds such as LSD).
I had a relative reduction in REM sleep compared to my average and felt a small amount of residual grogginess which I personally attribute to the marijuana.
When we went out for a late snack, I again had a thought and associated changes in perception (or vice-versa, who knows?) I discussed in ‘Onset’ – I saw a car headlight, and as the afterimage decayed from my visual field, I had the sense that it was slipping from my attentional system as well. It was moving further in space-time, and more internally, making its retrieval more difficult.
The answer is yes (though I am the writer of the piece that is linked, so take my answer with a grain of salt).
The number of novel mathematical objects encoded in the structure of one’s experience when under the influence of DMT is huge. Most mathematicians who try it will come out feeling that they “don’t even know where to start”.
So let’s start simple.
Consider the “Chrysanthemum” level of DMT intoxication (which is the 2nd of 6 levels). Anybody who has read “The Symmetry of Things” by John H. Conway, Heidi Burgiel, and Chaim Goodman-Strauss (or who has a deep acquaintance with symmetry groups by other means) will *readily recognize* the fact that the symmetry groups that appear on such DMT visuals are *not Euclidean*.
At that level they would see rapidly-flickering superpositions of hyperbolic symmetry groups like *2 3 11, *2 3 7, 2 4 5, 2 3 9 (the picture below), etc. Together with the fact that these visuals are completely “flat-looking” rather than curved, this is the smoking gun that what you are looking at/experiencing is a hyperbolic phenomenal space.
2 3 9 Hyperbolic Symmetry Group
And this is not even discussing the 3D hyperbolic space that becomes apparent (if you know what to look for) on higher levels of DMT. For instance, on level 3 you can experience 3D Euclidean symmetry groups tesselate your visual field, on level 4 you can experience 3D hyperbolic space and “prime” objects that belong to that geometry (which are impossible to reproduce faithfully in Euclidean space). Level 5 leads to global topological bifurcations of the phenomenal space, which gives rise to even more exotic objects with hard-to-grasp mathematics. And level 6… well, there IS a level 6, and that’s as much as I’m willing to say for the time being.
In future, I believe that mathematicians who care to *look closely* will see the signature of exotic mathematical spaces on the “DMT Realms” everywhere. This will become common knowledge in both neuroscience and mathematical circles.
As David Pearce likes to say: “Some people think we are reaching the age where fundamental knowledge has been achieved… I think the enterprise of knowledge has scarcely begun.” Studying exotic states of consciousness is not even at a pre-Galilean stage, it perhaps is even at a pre-Socratic stage. Alas, if more people pay attention and document their experiences carefully, such that a critical mass of rational brilliant psychonauts is reached, there will be a “knowledge explosion”.
I had two or three such experiences on my new batch of LSD, taking perhaps 2 or 3 “hits” (tabs) each time (presumed to be about [100] micrograms, or “mikes” per tab). And each time the experience became somewhat more familiar, and I learned to think more clearly under its influence. In July 1990 I took a trip to Europe with Tim, a colleague from work, because we were both presenting posters at a neural network conference in Paris, and the company where we worked very kindly funded the travel expenses. Tim and I took this opportunity to plan a little excursion around Europe after the conference, visiting Germany, Austria, Italy, and Switzerland touring in a rented car. When we got to Austria we bought a little tent at a camping store, then we hiked up an enormous mountain in the Alps, and spent the day sightseeing at the top. When I told Tim that I happened to have some LSD with me, his eyes lit up. It turns out he too had been a hippy in his youth, and had even attended the original Woodstock, so he immediately warmed to the idea of taking LSD with me on a mountain top, although he had not done psychedelic drugs in over a decade. So there in the most stupendous and idyllic setting of a mountain in the Austrian alps, early the next morning after camping overnight, we consumed five hits of LSD each, and spent the day in profound wonder at the glory of creation!
I made a few new and interesting discoveries on that mountain top in Austria. First of all, I learned to have a great deal more control of the experience in the following manner. I discovered that the effects of LSD become markedly stronger and more pronounced when you sit still and stare, and clear your mind, much like a state of zen meditation, or pre-hypnotic relaxation. When you do this under LSD, the visual world begins to break up and fragment in a most astonishing way. You tend to lose all sense of self, that is, you lose the distinction between self and non-self. This can be a very alarming experience for those who are prone to panic or anxiety, or for those who insist on maintaining a level of control and awareness of themselves and the world around them. But I also discovered that this mental dissociation and visual confusion can be diminished, and normal consciousness can be largely restored by simply looking around, moving about, and interacting actively with the world around you. Because when you do this, suddenly the world appears as a solid and stable structure again, and your familiar body reappears where it belongs at the center of your world of experience. This discovery greatly enhanced my ability to explore the deeper spaces of consciousness revealed by the drug, while providing an insurance against the natural panic that tends to arise with the dissolusion of the self, and the world around you. It allowed me to descend into the depths of the experience while maintaining a life line back to consensual reality, like a spelunker descending into the bowels of the deep underground cavern of my mind, while always able to return safely to the surface. And what a splendid and magnificent cavern it was that I discovered within my mind!
One of the most prominent aspects of consciousness that has puzzled philosophers and psychologists for centuries is the unity of conscious experience. We feel that we live in a world that surrounds our body, and that world appears as a single “picture” or volumetric spatial structure, like a theatre set, every piece of which takes its proper place in the panorama of surrounding experience. It has always been somewhat difficult to grasp this notion of conscious unity, because it is difficult to even conceptualize the alternative. What would consciousness be like if it were not unified? What does that even mean? Under LSD you can discover what non-unified consciousness is like for yourself, and that in turn by contrast offers profound insights as to the nature and meaning of unified consciousness. Again, the most interesting revelations of the psychedelic experience are not confined to that experience itself, but they reveal insights into the nature of normal conscious experience that might otherwise be missed due to its familiarity. In fact, I realized much later, even normal consciousness has aspects which are not unified.
The most familiar example of non-unified consciousness is seen in binocular vision. Under normal conditions the two eyes view the same scene and produce a three-dimensional “picture” in the mind that is a unified construction based on the information from both eyes simultaneously. But everyone knows the experience of double vision. For those with greater control over their own visual function, double vision is easily achieved by simply staring into space and relaxing the eyes. As a vision scientist myself, I have trained myself to do this so as to be able to “free fuse” a binocular pair of left-eye, right-eye images to create the perception of a 3D scene. For those who have difficulty with this, a similar experience can be had by holding a small mirror at an angle close in front of one eye, so as to send very different images into the two eyes. Whichever way you do it, the result is rather unremarkable in its familiarity, and yet when you think of it, this is in fact an example of disunity of conscious experience that is familiar to one and all. For what you see in double vision is actually two visual experiences which are seen as if they are superimposed in some manner, and yet at the same time they are also experienced each in its own separate disconnected space. It is generally possible to observe the correspondence between these two disconnected visual experiences, for example to determine which point in one eye view relates to a particular point in the other, as if viewing two slide transparencies that are overlaid on top of one another, although this correspondence is shifting and unstable, as the vergence between your two eyes tends to wander when binocular fusion is broken. But in fact it is more natural to simply ignore that correspondence and to view the two visual experiences as separate and disconnected spaces that bear no significant spatial relation to each other. When the images in our two eyes do not correspond, we tend to focus on one while ignoring the other, like an experienced marksman who no longer has to close his idle eye while aiming a gun. And yet, although the image from the idle eye is generally ignored, it has not left consciousness entirely, and with an effort, or perhaps more accurately, with an absence of effort or focus, it is possible to experience both views simultaneously.
In the trance-like state of yoga-like meditation performed under LSD, the entire visual world breaks up and fragments in this manner into a multitude of disconnected parallel conscious experiences, each one only loosly related spatially to the other experiences in the visual field. The effect is much enhanced by the fact that your eyes actually diverge or relax in this mental state, as they do under binocular fission, and this helps trigger the state of visual confusion as your mind gives up on trying to make sense of what it is seeing. As in Zen meditation, the LSD trance state is a passive or receptive state of consciousness that allots equal attention, or perhaps lack of attention, to all components of experience, which is why they appear in parallel as separate disconnected pieces. The state of normal active consciousness resists this kind of parallel confusion, and tends to select and focus on the the most significant portion, like the marksman aiming a gun, suppressing alternative experiences such as the view from the idle eye.
The deep LSD-induced trance state can be easily broken by simply moving the eyes, so conversely, the deeper states are achieved by complete mental and physical relaxation, with glazed eyes staring blankly into space. But of all the separate fragments of visual experience observed in this mental state, there is one special fragment located at the very center of the visual field, the foveal center, that appears somewhat sharper and clearer than the rest of the visual field. In fact, the visual fragmentation is somewhat like a kind of tunnel vision in which the peripheral portions of the visual field break off and disconnect from this central portion of the experience. But while the peripheral fragments become separated from the whole, they are never entirely and completely independent, but appear to interact with each other, and especially with the central foveal image in characteristic ways. For example if the foveal image shows a couple of blades of grass, twitching and dancing in the wind, then if any of the peripheral fragments of visual experience happen to show a similar image, i.e. blades of grass at a similar angle and twitching and dancing in synchrony with those in the foveal view, then the central and peripheral images become instantly coupled into a larger unified perceptual experience of a global motion sweeping through the image. Instead of a million blades of grass each twitching individually, we perceive the invisible wind as a wave of synchronous motion that sweeps invisibly across the blades of grass. The waves of motion caused by the wind are perceived as waves of energy across the visual field, a perceptual experience of something larger than the individual grass blades that collectively give rise to it. By careful adjustment of my state of relaxation, I found I could relax until the visual world fragmented into a million independent experiences, and I could gently bring it back into focus, as first a few, and then ever more of the fragmented visual experiences coupled together into fewer separate, and eventually a single unified global experience, much like the moment of binocular fusion when the two monocular images finally lock into each other to produce a single binocular experience.
When the visual world was locked into a unified perceptual experience, even then there were instabilities in local portions of the scene. A little detail seen in distant trees appears first as a mounted horseman, then pops abruptly into a hand with three fingers extended, then to a duck on a branch, then back to the mounted horseman, all the while the actual shape and color perceived remain unchanged, it is only the interpretation, or visual understanding of that pattern that switches constantly, as when a child sees mountains and castles in the clouds. One of the many possible interpretations is of a dead tree with leafless branches, (the veridical percept of what was actually there) and that is the only alternative that enters consciouseness under normal circumstances. The effect of LSD is to make the visual system more tolerant of obvious contradictions in the scene, such as a giant horseman frozen in a line of trees. The effect is like those surrealistic Dali paintings, for example the Three Ages of Man, shown in Figure 2.1, where one sees a single coherent scene, local parts of which spontaneously invert into some alternative interpretation. This is very significant for the nature of biological vision, for it shows that vision involves a dynamic relaxation process whose stable states represent the final perceptual interpretation.
There was another interesting observation that I made that day. I noticed that under LSD things appear a little more regular and geometrical than they otherwise do. It is not the shape of things that is different under LSD, but rather the shape of the things we see in objects. For example a cloud is about as irregular and fragmented a shape as a shape can be, and yet we tend to see clouds in a simplified cartoon manner, as a little puff composed of simple convex curves. A real cloud under closer inspection reveals a ragged ugly appearance with very indefinite boundaries and irregular structure. Under LSD the cloud becomes even more regular than usual. I began to see parts of the cloud as regular geometrical shapes, seeing the shapes in the shapes of the cloud as if on a transparent overlay.
Another rather astonishing observation of the LSD experience was that the visual world wavered and wobbled slowly as if the visual scene was painted on an elastic canvas that would stretch over here while shrinking over there, with great waves of expansion and contraction moving slowly across the scene, as if the whole scene was “breathing”, with its component parts in constant motion relative to each other. This was perhaps the most compelling evidence that the world of experience is not the solid stable world that it portrays. Figure 2.2 shows a sketch I made shortly after my alpine mountain adventure to try to express the wavery elasticity and the visual regularity I had observed under LSD. This picture is of course an exaggeration, more of an impression than a depiction of how the experience actually appeared.
The geometrical regularity was particularly prominent in peripheral vision, when attending to the periphery without looking to see what is there. Usually peripheral vision is hardly noticed, giving the impression of a homogeneous visual field, but under LSD the loss of resolution in peripheral vision becomes more readily apparent, especially when holding a fixed and glassy stare. And in that periphery, objects like trees or shrubs appear more regular and geometrical than they do in central vision, like artificial Christmas trees with perfectly regular spacing of brances and twigs. Again, it was not the raw image in the periphery that appeared regular or geometrical, but rather it was the invisible skeleton of visual understanding derived from that raw colored experience that exhibits the more regular features. And suddenly I could see it. This is the way the visual system encodes visual form in a compact or compressed manner, by expressing shape in terms of the next nearest regular geometrical form, or combination of forms. Children draw a tree as a circular blob of leaves on top of a straight vertical trunk, or a pine tree as a green triangle with saw-tooth sides. It is not that we see trees in those simplified forms, but rather that we see those simplified forms in the trees, and the forms that we perceive in these invisible skeletons are the expression of our understanding of the shapes we perceive those more irregular forms to have. This was later to turn into my harmonic resonance theory of the brain, as I sought an explanation for this emerging regularity in perception, but in 1990 all I saw was the periodicity and the symmetry, and I thought they were profoundly beautiful.
My friend Tim who had not done LSD for many years, responded to this sudden 5 hit dose by going into a state of complete dissociation. He lay down on the forest floor with glassy eyes, muttering “It is TOO beautiful! It is TOO beautiful!” and he did not respond to me, even when I stared him straight in the face. He reported afterwards that he found himself in a giant Gothic cathedral with the most extravagantly elaborate and brightly painted ornamental decorations all around him. This too can be seen as an extreme form of the regularization discussed above. Under the influence of this powerful dose, Tim’s visual brain could no longer keep up with the massive irregularity of the forest around him, and therefore presented the forest in simplified or abbreviated form, as the interior of a Gothic cathedral. It captures the large geometry of a ground plane that supports an array of vertical columns, each of which fans out high overhead to link up into an over-arching canopy of branches. The only difference is that in the Gothic cathedral the trees are in a regular geometrical array, and each one is a masterpiece of compound symmetry, composed of smaller pillars of different diameters in perfectly symmetrical arrangements, and studded with periodic patterns of ribs, ridges, or knobby protruberances as a kind of celebration of symmetry and periodicity for their own sake. There is a kind of geometrical logic expressed in the ornamental design. If part of the cathedral were lost or destroyed, the pattern could be easily restored by following the same logic as the rest of the design. In information-theoretic terms, the Gothic cathedral has lots of redundancy, its pattern could be expressed in a very much simpler compressed geometrical code. In Tim’s drug-addled brain his visual system could only muster a simple code to represent the world around him, and that is why Tim saw the forest as a Gothic cathedral. Under normal conditions, the additional information of irregularity, or how each tree and branch breaks from the strict regularity of the cathedral model of it, creates the irregular world of experience that we normally see around us. This suggests that the beautiful shapes of ornamental art are not the product of the highest human faculty, as is commonly supposed, but rather, ornamental art offers a window onto the workings of a simpler visual system, whose image of the world is distorted by artifacts of the representational scheme used in the brain. The Gothic cathedral gives a hint as to how the world might appear to a simpler creature, a lizard, or a snake, to whom the world appears more regular than it does to us, because its full irregularity is too expensive to encode exhaustively in all its chaotic details. Of course the flip-side of this rumination is that the world that we humans experience, even in the stone-cold sober state, is itself immeasurably simpler, more regular and geometric, that the real world itself, of which our experience is an imperfect replica. In the words of William Blake, “If the doors of perception were cleansed, everything would appear to man as it is, infinite.”
Mittersill
While I was a PhD student at Boston University, my parents owned a beautiful ski lodge house in the picturesque town of Mittersill in the mountains of New Hampshire, and on spring breaks or long week-ends I would invite my friends, the other PhD candidates, up to Mittersill where we would take long hikes up the mountain, and spend evenings by the fireplace. I introduced a small circle of my friends to the illuminating experience of LSD, in the hopes of sharing some of my perceptual discoveries with them, and perhaps inducing them to learn to use the experience to make discoveries of their own. Eventually Mittersill became associated in our minds with these group trips with an ever-shrinking circle of true diehard psychonauts, making our regular pilgrimage up the mountain in search of Truth and to touch the face of God. We always brought a goodly supply of Happy T’Baccy, which provides a beautiful complement and bemellowment to the otherwise sometimes sharp and jangly LSD experience. Our pattern was usually to arrive on a Friday night, cook up a great feast, and spend an evening by the fire, drinking beer and/or wine and passing the pipe around until everyone felt properly toasted. The talk was often about the workings of mind and brain, since we were all students of cognitive and neural systems. We were all adept computer programmers and well versed in mathematics as part of our PhD studies, so we all understood the issues of mental computation and representation, and I found the conversations about the computational principles of the mind, to be most interesting and intellectually stimulating. This was the high point of my academic career, this is why people want to be scientists. The next morning we would rise early, and after a hearty breakfast, we would all set off up the mountain, which was a steep brisk climb of two or three hours. About half way up the mountain, at a carefully pre-planned time, we would stop, and each “dose up” with our individually chosen dose of LSD for the occasion, timed to reach the peak of the experience about the time we reached the peak of the mountain. Then we would continue our climb through the rich lush mountain forests of New Hampshire to the top of Maida Vale, the sub-peak next to Canon Mountain, from whence a stupendous view opened up across to Canon Mountain and the vast valley below. We would settle ourselves comfortably at some location off the beaten track, and spend the best hours of the day just dreaming crazy thoughts and drinking in the experience
By now I had perfected my introspective techniques to the point that I could voluntarily relax my mind into a state of total disembodiment. The visual world began to fragment, first into two large pieces as binocular fusion was broken, then into a few smaller fragments, and eventually into a miriad of separate fragments of consciousness, like the miriad reflections from a shattered mirror. I was fascinated by this state of consciousness, and how different it was from normal consensual reality. Most alarming or significant was the total absence of my body from its normal place at the center of my world. As the world began to fragment, my body would fragment along with it, disconnected pieces of my body seeming to exist independently, one part here, another over there, but in separate spaces that did not exist in a distinct spatial relation to each other, but as if in different universes, like reflections from different shards of a shattered mirror. And as the visual world attained total fragmentation, all evidence of my body completely vanished, and I lived the experience of a disembodied spirit, pure raw experience, just sensations of color, form, and light. I felt safe and secure in this environment among friends, so I did not mind the total vulnerability afforded by a complete functional shutdown of my mind in this manner. Besides, I had learned that I could snap back together again to a relatively normal consciousness at will, simply by getting up and looking around, and interacting with the world. I was endlessly fascinated by the state of complete disembodiment, and one feature of it impressed itself on me again and again, the geometric regularity of it all. There was a powerful tendency for everything to reduce to ornamental patterns, geometrical arrangements of three-dimensional shapes, like so many glistening gems in a jewelry store, with rich periodic and symmetrical patterns in deep vibrant colors. The deeper I plunged into the experience, the simpler and more powerfully emotive those patterns became. And since my body had totally vanished, these patterns were no longer patterns I viewed out in the world, but rather, the patterns were me, I had become the spatial patterns which made up my experience. I began to see that symmetry and periodicity were somehow primal to experience.
I remember lying on my back and watching the clouds in the sky overhead. Weather patterns are often chaotic at the tops of mountains, and on more than one occasion we were located at a spot where the clouds that formed on the windward side of the mountain were just cresting the summit, where they would dissove in a continuous process of chaotic fragmentation, a veritable Niagra Falls of nebular dissolution, evocative of the fragmentation of my psychedelic experience. The shattered shreds of cloud, viewed from this close up, were about the most ragged and irregular shapes you could imagine, and yet under the influence of the drug I kept seeing fleeting geometrical patterns in them. There were great circular pinwheels and arabesques, patterns like those carved in the doors of Gothic cathedrals, but each flashing in and out of brief existence so quickly that it would be impossible to draw them. I began to realize that the human mind is one great symmetry engine, that the mind makes sense of the world it sees by way of the symmetries that it finds in it. Symmetry is the glue that binds the fragments of experience into coherent wholes.
Figure 2.3 shows a series of paintings by artist Louis Wain, that I find very evocative of the LSD experience. Wain suffered a progressive psychosis that manifested itself in his art, which was originally quite realistic, becomming progressively more abstract and ornamental, in the manner I observed in the various stages or levels of my LSD dissociation. Figure 2.3 A shows a fairly realistic depiction of a cat, but there are curious artifacts in the textured background, a mere hint of periodicity breaking out. I would see such artifacts everywhere, almost invisible, fleeting, and faint, reminiscent of the ornamental pinstripe patterns painted on trucks and motorcycles, a kind of eddy in the stream of visual consciousness as it flows around visual features in the scene. As I descended into the fully dissociated states, the patterns would become more like Figure 2.3 B, C, and D, breathtakingly ornate, with many levels of compound symmetry, revealing the eigenfunctions of perceptual representation, the code by which visual form is represented in the brain.
At times we would break free from our individual reveries, and share absurd nonsensical conversations about our observations. One time, looking down at the vast valley stretching out below us, a vista that seemed to stretch out to distances beyond comprehension, my old friend Peter said that it was hard to tell whether all that scenery was just “way out there”, or was it “way WAY out there?” Of course we both laughed heartily at the absurdity of his statement, but I knew exactly what he meant. When viewing such a grand vista under normal consciousness, one is deeply impressed by the vastness of the view.
But under the influence of the drug, the vista somehow did not look quite as large as we “knew” that it really was. What Peter was saying was that for some strange reason, the world had shrunken back in on us, and that magnificently vast valley had shrunken to something like a scale model, or a diorama, where it is easy to see how vast the modeled valley is supposed to be, but the model itself appears very much smaller than the valley it attempts to portray. What Peter was observing was the same thing I had observed, and that was beginning to even become familiar, that the world of our experience is not a great open vastness of infinite space, but like the domed vault of the night sky, our experience is bounded by, and contained within, a vast but finite spherical shell, and under the influence of psychedelic drugs that shell seemed to shrink to smaller dimensions, our consciousness was closing in on its egocentric center. Many years later after giving it considerable thought, I built the diorama shown in Figure 2.4 to depict the geometry of visual experience as I observed it under LSD.
And when I was in the completely disembodied state, my consciousness closed in even smaller and tighter, the range of my experience was all contained within a rather modest sized space, like a glass showcase in a jewelry store, and the complexity of the patterns in that space was also reduced, from the unfathomably complex and chaotic fractal forms in a typical natural scene, to a much simpler but powerfully beautiful glistening ornamental world of the degree of complexity seen in a Gothic cathedral. The profound significance of these observations dawned on me incrementally every time we had these experiences. I can recall fragmentary pieces of insights gleaned through the confusion of our passage down the mountain, stopping to sit and think wherever and whenever the spirit took us. At one point three of us stopped by a babbling brook that was crashing and burbling through the rocks down the steep mountain slope. We sat in silent contemplation at this primal “white noise” sound, when Lonce commented that if you listen, you can hear a million different sounds hidden in that noise. And sure enough when I listened, I heard laughing voices and honking car horns and shrieking crashes and jangly music and every other possible sound, all at the same time superimposed on each other in a chaotic jumbled mass. It was the auditory equivalent of what we were seeing visually, the mind was latching onto the raw sensory experience not so much to view it as it really is, but to conjure up random patterns from deep within our sensory memory and to match those images to the current sensory input. And now I could see the more general concept. We experience the world by way of these images conjured up in our minds. I came to realize why the LSD experience was enjoyed best in outdoors natural settings, and that is because the chaos of a natural scene, with its innumerable twigs and leaves and stalks, acts as a kind of “white noise” stimulus, like the babbling brook, a stimulus that contains within it every possible pattern, and that frees our mind to interpret that noise as anything it pleases.
On one occasion, on arrival back down at the lodge, our minds were still reeling, and we were not yet ready to leave the magnificence of the natural landscape for the relatively tame and controlled environment indoors, so Andy and I stopped in the woods behind the house and just stood there, like deer in the headlights, drinking in the experience. It was a particularly dark green and leafy environment in the shadow behind the house, with shrubs and leaves at every level, around our ankles, our knees, our shoulders, and all the way up to a leafy canopy high overhead, and at every depth and distance from inches away to the farthest visible depths of the deep green woods. The visual chaos was total and complete, the world already fragmented into millions and millions of apparently disconnected features and facets uniformly in all directions, that it hardly required LSD to appreciate the richness of this chaotic experience. But under LSD, and with the two of us standing stock still for many long minutes of total silence, we both descended into a mental fragmentation as crazy as the fragmented world around us. My body disappeared from my experience, and I felt like I became the forest; the forest and all its visual chaos was me, which in a very real sense it actually was. And in that eternal timeless moment, wrapped in intense but wordless thought, I recognized something very very ancient and primal in my experience. I felt like I was sharing the experience of some primal creature in an ancient swamp many millions of years ago, when nature was first forging its earliest models of mind from the tissue of brain. I saw the world with the same intense attentive concentration, bewilderment, and total absence of human cogntive understanding, as that antediluvian cretaceous lizard must have experienced long ago and far away. The beautiful geometrical and symmetrical forms that condensed spontaneously in my visual experience were like the first glimmerings of understanding emerging in a primitive visual brain. This is why I do psychedelic drugs, to connect more intimately with my animal origins, to celebrate the magnificent mental mechanisms that we inherit from the earliest animal pioneers of mind.
One time after we had descended from the mountain and were sitting around the lodge drinking and smoking in a happy state of befuddlement, a peculiar phenomenon manifested itself that made a deep impression on me. It was getting close to supper time and somebody expressed something to that effect. But our minds were so befuddled by the intoxication that we could only speak in broken sentences, as we inevitably forgot what we wanted to say just as we started saying it, instantly confused by our own initial words. So the first person must have said something like “I’m getting hungry. Do you think…” and then tailed off in confusion. But somebody else would immediately sense the direction that thought was going, and would instinctively attempt to complete the sentence with something like “…we otta go get…” before himself becoming confused, at which a third person might interject “…something to eat?” It does not sound so remarkable here in the retelling, but what erupted before our eyes was an extraordinarily fluid and coherent session of what we later referred to as group thought, where the conversation bounced easily from one person to the next, each person contributing only a fragmentary thought, but nobody having any clear idea of what the whole thought was supposed to be, or how it was going to end. What was amazing about the experience was the coherence and purposefulness of the emergent thought, how it seemed to have a mind of its own independent of our individual minds, even though of course it was nothing other than the collective action of our befuddled minds. It was fascinating to see this thought, like a disembodied spirit, pick up and move our bodies and hands in concerted action, one person getting wood for the fire, another getting out a frying pan, a third going for potatoes, or to open a bottle of wine, none of it planned by any one person, and yet each person chipped in just as and when they thought would be appropriate, as the supper apparently “made itself” using us as its willing accomplices. It was reminiscent of the operational principle behind a ouija board, where people sitting in a circle around a table, all rest an index finger on some movable pointer on a circular alphabet board, and the pointer begins to spell out some message under the collective action of all those fingers. At first the emergent message appears random, but after the first few letters have been spelled out, the participants start to guess at each next letter, and without anyone being overtly aware of it, the word appears to “spell itself” as if under the influence of a supernatural force. As with the ouija board, none of us participating in the group thought experience could hold a coherent thought in their head, and yet coherent thoughts emerged nevertheless, to the bewilderment of us all. And later I observed the same phenomenon with different LSD parties. I have subsequently encountered people well versed in the psychedelic experience who claim with great certainty to have experienced mental telepathy in the form of wordless communication and sharing of thoughts. But for us hard-nosed scientific types, the natural explanation for this apparently supernatural experience is just as wonderous and noteworthy, because it offers a hint as to how the individual parts of a mind act together in concert to produce a unified coherent pattern of behavior that is greater than the mere sum of its constituent parts. The principle of group thought occurs across our individual brains in normal sober consciousness as we instinctively read each other’s faces and follow each other’s thoughts, and it is seen also whenever people are moving a heavy piece of furniture, all lifting and moving in unison in a coherent motion towards some goal. But the psychedelic experience highlighted this aspect of wordless communication and brought it to my attention in clearer, sharper focus.
As the evening tailed on and the drug’s effect gradually subsided in a long slow steady decline, we would sit by the fire and pass a pipe or joint around, and share our observations and experiences of the day. At one point Lonce, who had just taken a puff of a joint, breathed out and held it contemplatively for a while, before taking a second puff and passing it on to the next person in the circle. I objected to this behavior, and accused Lonce of “Bogarting” the joint – smoking it all by himself without passing it along. Lonce responded to this with an explanation that where he comes from, people don’t puff and pass in haste, but every man has the right to a few moments of quiet contemplation and a second puff before passing it along. That was, he explained, the civilized way of sharing a joint. So we immediately adopted Lonce’s suggestion, and this method of sharing a joint has henceforth and forever since been referred to by us as the “Lonce Method”.
Theoretical Implications
As I have explained, the purpose of all this psychonautical exploration was not merely for our own entertainment, although entertaining it was, and to the highest degree. No, the primary purpose of these psychonautical exploits was clear all along at least in my mind, and that was to investigate the theoretical implications of these experiences to theories of mind and brain. And my investigations were actually beginning to bear fruit in two completely separate directions, each of which had profound theoretical implications. At that time I was studying neural network theories of the brain, or how the brain makes sense of the visual world. A principal focus of our investigation was the phenomena of visual illusions, like the Kanizsa figure shown in Figure 2.5 A. It is clear that what is happening here is that the visual mind is creating illusory contours that link up the fragmentary contours suggestive of the illusory triangle. In our studies we learned of Stephen Grossberg’s neural network model of this phenomenon. Grossberg proposed that the visual brain is equipped with oriented edge detector neurons that fire whenever a visual edge passes through their local receptive field. These neurons would be triggered by the stark black / white contrast edges of the stimulus in Figure 2.5 A. A higher level set of neurons would then detect the global pattern of collinearity, and sketch in the illusory contour by a process of collinear completion. These higher level “cooperative cells” were equipped with much larger elongated receptive fields, long enough to span the gap in the Kanizsa figure, and the activation of these higher level neurons in turn stimulated lower level local edge detector neurons located along the illusory contour, and that activation promoted the experience of an illusory contour where there is none in the stimulus
I believed I was seeing these illusory contours in my LSD experience, as suggested by all the curvy lines in my sketch in Figure 2.2 above. But I was not only seeing the contours in illusory figures, I was seeing “illusory” contours just about everywhere across the visual field. But curiously, these contours were not “visible” in the usual sense, but rather, they are experienced in an “invisible” manner as something you know is there, but you cannot actually see. However I also noticed that these contours did have an influence on the visible portions of the scene. I have mentioned how under LSD the visual world tends to “breathe”, to waver and wobble like a slow-motion movie of the bottom of a swimming pool viewed through its surface waves. In fact, the effect of the “invisible” contours was very much like the effect of the invisible waves on the surface of the pool, which can also be seen only by their effects on the scene viewed through them. You cannot see the waves themselves, all you can see is the wavering of the world caused by those waves. Well I was observing a very similar phenomenon in my LSD experience. I devised a three-dimensional Kanizsa figure, shown in Figure 2.5 B, and observed that even in the stone-cold sober state, I could see a kind of warp or wobble of the visual background behind the illusory contour caused by the figure, especially if the figure is waved back and forth gently against a noisy or chaotic background. So far, my LSD experiences were consistent with our theoretical understanding of the visual process, confirming to myself by direct observation an aspect of the neural network model we were currently studying in school.
But there was one aspect of the LSD experience that had me truly baffled, and that was the fantastic symmetries and periodicities that were so characteristic of the experience. What kind of neural network model could possibly account for that? It was an issue that I grappled with for many months that stretched into years. In relation to Grossberg’s neural network, it seemed that the issue concerned the question of what happens at corners and vertices where contours meet or cross. A model based on collinearity alone would be stumped at image vertices. And yet a straightforward extension of Grossberg’s neural network theory to address image vertices leads to a combinatorial explosion.The obvious extension, initially proposed by Grossberg himself, was to posit specialized “cooperative cells” with receptive fields configured to detect and enhance other configurations of edges besides ones that are collinear. But the problem is that you would need so many different specialized cells to recognize and complete every possible type of vertex, such as T and V and X and Y vertices, where two or more edges meet at a point, and each of these vertex types would have to be replicated at every orientation, and at every location across the whole visual field! It just seemed like a brute-force solution that was totally implausible.
Then one day after agonizing for months on this issue, my LSD observations of periodic and symmetrical patterns suddenly triggered a novel inspiration. Maybe the nervous system does not require specialized hard-wired receptive fields to accomodate every type of vertex, replicated at every orientation at every spatial location. Maybe the nervous system uses something much more dynamic and adaptive and flexible. Maybe it uses circular standing waves to represent different vertex types, where the standing wave can bend and warp to match the visual input, and standing waves would explain all that symmetry and periodicity so clearly evident in the LSD experience as little rotational standing waves that emerge spontaneously at image vertices, and adapt to the configuration of those vertices. Thanks to illegal psychotropic substances, I had stumbled on a staggeringly significant new theory of the brain, a theory which, if proven right, would turn the world of neuroscience on its head! My heart raced and pounded at the implications of what I had discovered. And this theory became the prime focus of my PhD thesis (Lehar 1994), in which I did computer simulations of my harmonic resonance model that replicated certain visual illusions in a way that no other model could. I had accomplished the impossible. I had found an actual practical use and purpose for what was becoming my favorite pass-time, psychedelic drugs! It was a moment of glory for an intrepid psychonaut, a turning point in my life. Figure 2.6 shows a page from my notebook dated October 6 1992, the first mention of my new theory of harmonic resonance in the brain.
Compare the above descriptions of point-of-view fragmentation, visual coherence, and symmetry as experienced on LSD, with our very own account of symmetrical pattern completion during psychedelic experiences as presented in Algorithmic Reduction of Psychedelic States (slightly edited for clarity):
Lower Symmetry Detection and Propagation Thresholds
Finally, this is perhaps the most interesting and ethically salient effect of psychedelics. The first three effects (tracers, drifting, and pattern recognition) are not particularly difficult to square with standard neuroscience. This fourth effect, while not incompatible with connectionist accounts, does suggest a series of research questions that may hint at an entirely new paradigm for understanding consciousness.
We have not seen anyone in the literature specifically identify this effect in all of its generality. The lowering of the symmetry detection threshold really has to be experienced to be believed. We claim that this effect manifests in all psychedelic experiences to a greater or lesser extent, and that many effects can in fact be explained by simply applying this effect iteratively.
Psychedelics make it easier to find similarities between any two given phenomenal objects. When applied to perception, this effect can be described as a lowering of the symmetry detection threshold. This effect is extremely general and symmetry should not be taken to refer exclusively to geometric symmetry.
How symmetries manifest depends on the set and setting. Researchers interested in verifying and exploring the quantitative and subjective properties of this effect will probably have to focus first on a narrow domain; the effect happens in all experiential modalities.
Credit: Chelsea Morgan from PsychonautWiki and r/replications
Symmetry detection during psychedelic experiences requires that one’s attention interprets a given element in the scene as a symmetry element. Symmetry elements are geometrical points of reference about which symmetry operations can take place (such as axes of rotation, mirror planes, hyperplanes, etc.). In turn, a collection of symmetry elements defines a symmetry structure in the following way: A symmetry structure is a set of n-dimensional symmetry elements for which the qualities of the experience surrounding each element obeys the symmetry constraints imposed by all the elements considered together.
Psychedelic symmetry detection can be (and typically is) recursively applied to previously constructed symmetry structures. At a given time multiple independent symmetry structures can coexist inside an experience. By guiding one’s attention one can make these structures interact and ultimately merge. Formally, each symmetry structure is capable of establishing a merging relationship with another symmetry structure. This is achieved by simultaneously focusing one’s attention on both. These relationships are fleeting, but they influence the evolution of the relative position of each symmetry element. When two symmetry structures are in a merging relationship, it is possible to rearrange them (with the aid of drifting and pattern recognition) to create a symmetrical structure that incorporates the symmetry elements of both substructures at once. To do so, one’s mind can either detect one (or several) more symmetry elements along which the previously-existing symmetry elements are made to conform, or, alternatively, if the two pre-existing symmetry structures share a symmetry element (e.g. an axis of rotation of order 3), these corresponding identical symmetry elements can fuse and become a bridge that merges both structures.
Surprisingly, valence seems to be related to psychedelic symmetry detection. As one constructs symmetry structures, one becomes aware of an odd and irresistible subjective pull towards building even higher levels of symmetry. In other words, every time the structure of one’s experience is simplified by identifying a new symmetry element in the scene, one’s whole experience seems to snap into a new (simplified) mode, and this comes with a positive feeling. This feeling can take many forms: it may feel blissful, interesting, beautiful, mind-expanding, and/or awe-producing, all depending on the specific structures that one is merging. Conversely when two symmetry structures are such that merging them is either tricky of impossible, this leads to low valence: frustration, anxiety, pain and an odd feeling of being stuck between two mutually unintelligible worlds. We hypothesize that this is the result of dissonance between the incompatible symmetry structures.
If one meditates in a sensorially-minimized room during a psychedelic experience while being aware that one’s symmetry detection threshold has been lowered by the substance, one can recursively re-apply this effect to produce all kinds of complex mathematical structures that incorporate complex symmetry element interactions. In other words, with the aid of concentration one can climb the symmetry gradient (i.e. increase the total number of symmetry elements) up to the point where the degrees of freedom afforded by the symmetry structure limit any further element from being incorporated into it. We will call these experiences peak symmetry states.
Future research should explore and compare the various states of consciousness that exhibit peak symmetry. There is very likely an enormous number of peak symmetry states, some of which are fairly suboptimal and others that cannot be improved upon. If there is a very deep connection between valence, symmetry, information and harmony, it would very likely show in this area. Indeed, we hypothesize that the highest levels of valence that can be consciously experienced involve peak symmetry states. Anecdotally, this connection has already been verified, with numerous trip reports of people achieving states of unimaginable bliss by inhabiting peak symmetry states (often described as fractal mandala-like mirror rooms).
The range of peak symmetry states include fractals, tessellations, graphs, and higher dimensional projections. Which one of these states contains the highest degree of inter-connectivity? And if psychedelic symmetry is indeed related to conscious bliss, which experience of symmetry is human peak bliss?
Higher Order Symmetry
Symmetrical Manifold
Scale-Free Fractal
Mirror Symmetry Tessellation
The pictures above all illustrate possible peak symmetry states one can achieve by combining psychedelics and meditation. The pictures illustrate only the core structure of symmetries that are present in these states of consciousness. What is being reflected is the very raw “feels” of each patch of your experiential field. Thus these pictures really miss the actual raw feelings of the whole experience. They do show, however, a rough outline of symmetrical relationships possible in one of these experiences.
Since control interruption is also co-occurrent with the psychedelic symmetry effect, previously-detected symmetries tend to linger for long periods of time. For this reason, the kinds of symmetries one can detect at a given point in time is a function of the symmetries that are currently being highlighted. And thanks to drifting and pattern recognition enhancement, there is some wiggle room for your mind to re-arrange the location of the symmetries experienced. The four effects together enable, at times, a smooth iterative integration of so many symmetries that one’s consciousness becomes symmetrically interconnected to an unbelievable degree.
What may innocently start as a simple two-sided mirror symmetry can end up producing complex arrangements of self-reflecting mirrors showing glimpses of higher and higher dimensional symmetries. Studying the mathematical properties of the allowed symmetries is a research project that has only just begun. I hope one day dedicated mathematicians describe in full the class of possible high-order symmetries that humans can experience in these states of consciousness.
Anecdotally, each of the 17 possible wallpaper symmetry groups can be instantiated with this effect. In other words, psychedelic states lower the symmetry detection threshold for all of the mathematically available symmetrical tessellations.
All of the 17 2-dimensional wallpaper groups can be experienced with symmetry planes detected, amplified and re-arranged during a psychedelic experience.
Revising the symmetrical texture repetition of grass shown above, we can now discover that the picture displays the wallpaper symmetry found in the lower left circle above:
In very high doses, the symmetry completion is so strong that at any point one risks confusing left and right, and thus losing grasp of one’s orientation in space and time. Depersonalization is, at times, the result of the information that is lost when there is intense symmetry completion going on. One’s self-models become symmetrical too quickly, and one finds it hard to articulate a grounded point of view.
LSD-like states allow the global binding of otherwise incompatible schemas by softening the degree to which neighborhood constraints are enforced. The entire experience becomes a sort of chaotic superposition of locally bound islands that can, each in its own way, tell sensory-linguistic stories in parallel about the unique origin and contribution of their corresponding gestalts to the narrative of the self.
This phenomenon forces, as it were, the onset of cognitive dissonance between incompatible schemas that would otherwise evade mutual contact. On the bright side, it also allows mutual resonance between parts that agree with each other. The global inconsistencies are explored and minimized. One’s mind can become a glorious consensus.
Each square represents, and carries with it, the information of a previously experienced cognitive gestalt (situational memories, ideas, convictions, etc.). Some gestalts never come up together naturally. The LSD-like state allows their side-by-side comparison.
In therapy, LSD-like states had been used for many decades in order to integrate disparate parts of one’s personality into a (more) coherent and integrated lifeworld. But scientists at the beginning didn’t know why this worked.
The Turing module then discovered that the kaleidoscopic world of acid can be compared to raising the temperature within an Ising model. If different gestalts imply a variety of semantic-affective constraints, kaleidoscopic Frame Stacking has the formal effect of expanding the region of one’s mind that is taken into consideration for global consistency at any given point in time. The local constraints become more loose, giving global constraints the upper hand. The degree of psychedelia is approximately proportional to the temperature of the model, and when you let it cool, the grand pattern is somewhat different. It is more stable; one arrives at a more globally consistent state. Your semantic-affective constraints are, on the whole, better satisfied. The Turings called this phenomenon qualia annealing.
Ising Model – A simple computational analogy for the LSD-induced global constraint satisfaction facilitation.
If one ups the dose a little bit and lands somewhere in the range between 4 to 8 mg, one is likely to experience what Terrence McKenna called “the Chrysanthemum”. This usually manifests as a surface saturated with a sort of textured fabric composed of intricate symmetrical relationships, bright colors, shifting edges and shimmering pulsing superposition patterns of harmonic linear waves of many different frequencies.
Depending on the dose consumed one may experience either one or several semi-parallel channels. Whereas a threshold dose usually presents you with a single strong vibe (or ambiance), the Chrysanthemum level often has several competing vibes each bidding for your attention. Here are some examples of what the visual component of this state of consciousness may look like.
2D Chrysanthemum
2.5D Chrysanthemum
Chrysanthemum with multuple symmetry channels
The visual component of the Chrysanthemum is often described as “the best screen saver ever“, and if you happen to experience it in a good mood you will almost certainly agree with that description, as it is usually extremely harmonious, symmetric and beautiful in uncountable ways. No external input can possibly replicate the information density and intricate symmetry of this state; such state has to be endogenously generated as a a sort of harmonic attractor of your brain dynamics.
You can find many replications of Chrysanthemum-level DMT experiences on the internet, and I encourage you to examine their implicit symmetries (this replication is one of my all-times favorite).
In Algorithmic Reduction of Psychedelic States we posited that any one of the 17 wallpaper symmetry groups can be instantiated as the symmetries that govern psychedelic visuals. Unfortunately, unlike the generally slow evolution of usual psychedelic visuals, DMT’s vibrational frequency forces such visuals to evolve at a speed that makes it difficult for most people to spot the implicit symmetry elements that give rise to the overall mathematical structure underneath one’s experience. For this reason it has been difficult to verify that all 17 wallpaper groups are possible in DMT states. Fortunately we were recently able to confirm that this is in fact the case thanks to someone who trained himself to do just this. I.e. detecting symmetry elements in patterns at an outstanding speed.
An anonymous psychonaut (whom we will call researcher A) sent a series of trip report to Qualia Computing detailing the mathematical properties of psychedelic visuals under various substances and dose regimens. A is an experienced psychonaut and a math enthusiast who recently trained himself to recognize (and name) the mathematical properties of symmetrical patterns (such as in works of art or biological organisms). In particular, he has become fluent at naming the symmetries exhibited by psychedelic visuals. In the context of 2D visuals on surfaces, A confirms that the symmetrical textures that arise in psychedelic states can exhibit any one of the 17 wallpaper symmetry groups. Likewise, he has been able to confirm that every possible spherical symmetry group can also be instantiated in one’s mind as a resonant attractor on these states.
The images below show some examples of the visuals that A has experienced on 2C-B, LSD, 4-HO-MET and DMT (sources: top left, top middle, the rest were made with this service):
Wallpaper symmetry chart with 5 different notations
p1
pmm
cmm
pg
p4
p3
p4g (this one can make you feel dizzy)
The Chrysanthemum level interacts with sensory input in an interesting way: the texture of anything one looks at quickly becomes saturated with nested 2-dimensional symmetry groups. If you took enough DMT to take you to this level and you keep your eyes open and look at a patterned surface (i.e. statistical texture), it will symmetrify beyond recognition. A explains that at this level DMT visuals share some qualities with those of, say, LSD, mescaline, and psilocin. Like other psychedelics, DMT’s Chrysanthemum level can instantiate any 2-dimensional symmetry, yet there are important differences from other psychedelics at this dose range. These include the consistent change in ambiance (already present in threshold doses), the complexity and consistency of the symmetrical relationships (much more dense and whole-experience-consistent than is usually possible with other psychedelics), and the speed (with a control-interruption frequency reaching up to 30 hertz, compared to 10-20 hertz for most psychedelics). Thus, people tend to point out that DMT visuals (at this level) are “faster, smaller, more detailed and more globally consistent” than on comparable levels of alteration from similar agents.
Now, if you take a dose that is a little higher (in the ballpark of 8 to 12 mg), the Chrysanthemum will start doing something new and interesting…
(3) The Magic Eye Level
A great way to understand the Magic Eye level of DMT effects is to think of the Chrysanthemum as the texture of an autostereogram (colloquially described as “Magic Eye” pictures). Our visual experience can be easily decomposed into two points-of-view (corresponding to the feed coming from each eye) that share information in order to solve the depth-map problem in vision. This is to map each visual qualia to a space with relative distances so (a) the input is explained and (b) you get recognizable every-day objects represented as implicit shapes beneath the depth-map. You can think of this process as a sort of hand-shake between bottom-up perception and top-down modeling.
In everyday conditions one solves the depth-map problem within a second of opening one’s eyes (minus minor details that are added as one looks around). But on DMT, the “low-level perceptions” looks like a breathing Chrysanthemum, which means that the top-down modeling has that “constantly shifting” stuff to play with. What to make of it? Anything you can think of.
There are three major components of variance on the DMT Magic Eye level:
Texture (dependent on the Chrysanthemum’s evolution)
World-sheet (non-occluduing 3D1T depth maps)
Extremelly lowered information copying threshold.
The image on the left is a lobster, the one on the center is a cone and the one to the right contains furniture (a lamp, a chair and a table). Notice that what you see is a sort of depth-map which encodes shapes. We will call this depth-map together with the appearance of movement and acceleration represented in it, a world-sheet.
World-Sheets
The world-sheet encodes the “semantic content” of the scene and is capable of representing arbitrary situations (including information about what you are seeing, where you are, what the entities there are doing, what is happening, etc.).
It is common to experience scenes from usually mundane-looking places like ice-cream stores, play pens, household situations, furniture rooms, apparel, etc.. Likewise, one frequently sees entities in these places, but they rarely seem to mind you because their world is fairly self-contained. As if seeing through a window. People often report that the worlds they saw on a DMT trip were all “made of the same thing”. This can be interpreted as the texture becoming the surfaces of the world-sheet, so that the surfaces of the tables, chairs, ice-cream cones, the bodies of the people, and so on are all patterned with the same texture (just as in actual autostereograms). This texture is indeed the Chrysanthemum completely contorted to accommodate all the curvature of the scene.
Magic Eye level scenes often include 3D geometrical shapes like spheres, cones, cylinders, cubes, etc. The complexity of the scene is roughly dose-dependent. As one ups the highness (but still remaining within the Magic Eye level) complex translucid qualia crystals in three dimensions start to become a possibility.
Whatever phenomenal objects you experience on this level that lives for more than a millisecond needs to have effective strategies for surviving in an ecosystem of other objects adapted to that level. Given the extremely lowered information copying threshold, whatever is good at making copies of itself will begin to tesselate, mutate and evolve, stealing as much of your attention as possible in the way. Cyclic transitions occupy one’s attention: objects quickly become scenes which quickly become gestalts from which a new texture evolves in which new objects are detected and so on ad infinitum.
A reports that at this dose range one can experience at least some of the 230 space groups as objects represented in the world-sheet. For example, A reports having stabilized a structure with a Pm-3m symmetry structure, not unlike the structure of ZIF-71-RHO. Visualizing such complex 3D symmetries, however, does seem to require previous training and high levels of mental concentration (i.e. in order to ensure that all the symmetry elements are indeed what they are supposed to be).
There is so much qualia laying around, though, at times not even your normal space can contain it all. Any regular or semi regular symmetrical structure you construct by centering your attention prone to overflow if you focus too much on it. What does this mean? If you focus too much on, for example, the number 6, your mind might represent the various ways in which you can arrange six balls in a perfectly symmetrical way. Worlds made of hexagons and octahedrons interlocked in complex but symmetrical ways may begin to tesselate your experiential field. With every second you find more and more ways of representing the number six in interesting, satisfying, metaphorically-sound synesthetic ways (cf. Thinking in Numbers). Now, what happens if you try to represent the number seven in a symmetric way on the plane? Well, the problem is that you will have too many heptagons to fit in Euclidean space (cf. Too Many Triangles). Thus the resulting symmetrical patterns will seem to overflow the plane (which is often felt as a folding and fluid re-arrangement, and when there is no space left in a region it either expands space or it is felt as some sort of synesthetic tension or stress, like a sense of crackling under a lot of pressure).
Heptagonal tiling of the Poincaré disk representing the 2D hyperbolic space.
Triheptagonal tiling
Order-7-3 rhombille tiling
In particular, A claims that in the lower ranges of the DMT Magic Eye level the texture of the Chrysanthemum tends to exhibit heptagonal and triheptagonal tilings (as shown in the picture above). A explains that at the critical point between the Chrysanthemum and the Magic Eye levels the intensity of the rate of symmetry detection of the Chrysanthemum cannot be contained to a 2D surface. Thus, the surface begins to fold, often in semi-symmetric ways. Every time one “recognizes” an object on this “folding Chrysanthemum” the extra curvature is passed on to this object. As the dose increases, one interprets more and more of this extra curvature and ends up shaping a complex and highly dynamic spatiotemporal depth map with hyperbolic folds. In the upper ranges of the Magic Eye level the world-sheet is so curved that the scenes one visualize are intricate and expansive, feeling at times like one is able to peer through one’s horizon in all directions and see oneself and one’s world from a distance. At some critical point one may feel like the space around one is folding into a huge dome where the walls are made of whatever texture + world-sheet combination happened to win the Darwinian selection pressures applied to the qualia patterns on the Magic Eye level. This concentrated hyperbolic synesthetic texture is what becomes the walls of the Waiting Room…
As suggested by the quotes above, psychedelic symmetries are extremely beautiful. This is puzzling for most worldviews. But once you take into account the Tyranny of the Intentional Object and the Symmetry Theory of Valence, it begins to make sense why peak symmetry on psychedelics is so delightfully amazing (sometimes unimaginably better than a great orgasm or a back-rub on ecstasy). In this vein, we are proud to point out that we have worked out some precise, empirically testable, predictions based on connectome-specific harmonic waves and the symmetry theory of valence (see: Quantifying Bliss).
Interestingly, the process of point-of-view fragmentation and subsequent annealing to global geometric coherence is hinted at by John C. Lilly in his book Programming and Metaprogramming in the Human Biocomputer (you can read the relevant quote here: Psychedelic alignment cascades).
As evidenced in Steven Lehar’s writeup (and the other quotes and references provided above), we could say that giving psychedelics to brilliant people with a scientific background in cognitive science and natural philosophical talent does indeed have the ability to expand our evidential base for the nature of consciousness and the way our brains work.
It is thus far more useful for the advancement of the science of consciousness to allocate such experiences to serious scientifically-minded psychonauts than it is to give those same agents to people with pre-scientific frameworks. The phenomenological descriptions and insights provided by a single Steven Lehar on acid are worth a thousand Buddhists, French Existentialists, poets, and film-makers on LSD.
Either way, it is unconscionable that today most leading academics working on the problem of consciousness have no personal experience with these agents, nor they show much interest in the alien state-spaces that they disclose. That’s about as weird as physicists only showing interest in what happens at room-temperature, even though most precise mathematical theories of the physical world can only be tested in extreme conditions (such as high-energy particle collisions). Just as we can expect that a few observations of the behavior of matter in extreme conditions will provide a lot more information than thousands of observations of matter in known “everyday” conditions, the ultimate nature of qualia is most likely to be understood by studying its properties in extreme (e.g. high-energy) neuronal environments.
Below I provide a summary of the Quantifying Bliss talk at Consciousness Hacking (video; 360 degree live feed record), which took place on June 7th 2017. I am currently working on a longer and more precise treatment of the topic, which I will be posting here as well. That said, since the talk already makes clear, empirically testable predictions, I decided to publish this summary as soon as possible. After all, there is only a small window of opportunity to publish one’s testable predictions online before the experiment is run and they turn into “retrodictions”. By writing this out and archiving it on time I’m enabling future-me to say “called it!” (if the results are positive) or “at least I tried” (if the experiment fails to show the predicted effects). Better do this quick, then, for science!
The Purpose of Life
1
2
3
4
5
We begin by asking the question “what is the purpose of life?”. In order to give a sense for where I am coming from, I explain that I think that the purpose of life is…
To Understand the Universe
To be Happy, and Make Others Happy
I admit that for the first half of my life I thought that the only purpose of life was to understand the universe. If anything, in light of this exclusive goal, happiness could be seen as a temporary distraction rather than something to pursue for its own sake. Thankfully, as a teenager I was exposed to philosophy of mind, was introduced to meditation, and experimented with psychedelics, all of which pointed me to the fact that (a) we don’t understand consciousness yet, and (b) happiness is really a lot more important than we usually think, even if one is only concerned with the most theoretical and abstract level of understanding possible.
I now regard “to understand the universe” and “to be happy and make others happy” on an equal footing. More so, these two life goals complement each other. On the one hand, understanding the universe will allow you to figure out how to make anyone happy. And on the other hand, being happy and making others happy can allow you to stay motivated in order to figure out the nature of reality. Hence one can think of these two life goals as synergistic rather than as being in opposing camps (of course, at the edges, one will be forced to choose one over the other, but we are nowhere near the point where this is a concern).
By taking these two “purposes of life” seriously we are then faced with a crucial question: What makes an experience valuable? In other words, for someone who is both trying to understand the universe and trying to make its inhabitants as happy as possible, the question “how do you measure the value of an experience?” becomes important.
At Qualia Computing we generally answer that question using the following criteria
Does it feel good? (happy, loving, pleasant)
Does it make you productive (in a good way)?
Does it make you ethical?
That is to say, the value that we assign to an experience is guided by three criteria. In brief, a valuable experience is one that feels good (i.e. has positive hedonic tone), improves your productivity (in the sense of helping you pursue your own values effectively), and makes you more ethical – both towards yourself and others. That said, for the purpose of this talk, I make it explicit that I will only discuss how to measure (1). In other words, we will concern ourselves with what makes an experience feel good; ethics and productivity are discussed elsewhere.*
What is Bliss?
6
7
8
So what makes an experience feel good? The “feel good” quality of an experience is usually called valence in psychology and neuroscience (also described as the “pleasure-pain axis”). This quality is to be distinguished from arousal, which refers to the amount of energy expressed in an experience. Four examples: Excitement is a high-valence, high-arousal state. Serenity is a high-valence, low-arousal state. Anxiety is low-valence, high-arousal. And depression low-valence, low-arousal.
For some people valence and arousal are correlated (either negatively or positively as shown by Peter Kuppens). Likewise, one’s culture can have a large influence on the way one conceptualizes of valence (or ideal affect, as demonstrated in the extensive work of Jeanne Tsai). That said, valence is not a cultural phenomenon; even mice can experience negative and positive valence.
Even though valence and arousal do seem to explain a big chunk of the differences between emotions, we can nonetheless find many cases where the “texture” of two emotions feel very different even though their valence and their arousal are similar. Hence we ask ourselves: How do we explain and characterize the textural differences between such emotions?
And across all of the possible intensely blissful states on offer (encompassing all of the possible inner meanings present), what exactly is shared between them all at their very core?
Some interpret holistic feelings of wellbeing as a sort of spiritual signal. In this interpretation, feeling at a very deep level that the world is good, that things fall into place perfectly, that you don’t owe anything to anyone, etc. is a sign that you are on the right (spiritual) track. Undoubtedly many people use the (often extreme) positive shift in their valence upon religious conversion as evidence of the validity of their choice. Intense positive valence may not throw Bayesian purists off-balance, but for the rest of the world, blissful experiences are often found as cornerstones of worldviews.
Other people say that bliss is “just chemicals in your brain”. Some claim that it’s more a matter of the functional state of your pleasure centers (themselves affected by dopamine, opioids, etc.) rather than the chemicals themselves. Many others are focused on what usually triggers happiness (e.g. learning, relationships, beliefs, etc.) rather than on what, absolutely, needs to happens for bliss to take place in the simplest experiential terms possible. Most who study this closely become mystics.
Could it be that there’s something structural that makes the experiences feel good? Let’s say that there exists a good-fitting mathematical object that translates brain states to experiences. What mathematical property of that object would valence look like? Our proposal is very simple. In some sense it is the simplest possible theory for the important theory of consciousness. We propose thesymmetry theory of valence (or “STV”; historical note: STV was first articulated and argued for in Michael Johnson’s Principia Qualia).
(The important theory of consciousness is the question that asks why experience feels good and/or bad, vs. e.g. the hard problem of consciousness, why consciousness exists to begin with).
The Symmetry Theory of Valence
11
10
9. Symmetry Theory of Valence
We are pretty confident that consciousness is a real and a measurable phenomenon. That’s why Consciousness Hacking is such a good venue for this kind of discussion. Because here we can talk freely about the properties of consciousness without getting caught up about whether it exists at all. Now, symmetry is a very general term, how is that precise?
Harmony feels good because it’s symmetry over time. In reality, our moments of experience contain a temporal direction. I call this a pseudo-time arrow, since its direction is likely encoded in the patterns of statistical independence between the qualia experienced. And by manipulating the symmetrical connectivity of the micro-structure of one’s consciousness, one can change the perception of time. It’s a change in the way one evaluates when one is and how fast one is going.
In this model, the pleasure centers would work as “tuning knobs” of harmonic patterns. They are establishing the mood, the underlying tone to which the rest needs to adapt. And the emotional centers, including the amygdala, would be strategically positioned to add anti-symmetry instead. Hence, in this framework we would think of boredom is an “anti-symmetry” mechanism. It prevents us from getting stuck in shallow ponds, but it can be nasty if left unchecked. Cognitive activity may be in part explained by differences in boredom thresholds.
In her talk she shows how one can measure the various “pure harmonics” in a given brain. The core idea is that brain activity can be interpreted as a weighted sum of “natural resonant frequencies” for the entire connectome (white matter tracks together with the grey matter connections). They actually take the physical structure of a mapped brain and simulate the effect of applying the excitation-inhibition differential equations known for collective neural activity propagation. Then they infer the presence and prevalence of these “pure harmonics” in a brain at a given point in time using a probabilistic reconstruction.
Chladni plates here are a wonderful metaphor for these brain harmonics. This is because the way the excitation-inhibition wavefront propagates is very similar in both Chladni plates and human brains. In both cases the system drifts slowly within the attractor basin of natural frequencies, where the wavefront wraps around the medium an integer number of times. I was in awe to see her approach applied to psychedelic research. After all, Qualia Computing has indeed explored harmonic patterns in psychedelic experiences (ex. 1, ex. 2, ex. 3), and the connection was made explicit in Principia Qualia (via the concept of neuroacoustic modulation).
But how do these harmonics look like in the brain? Show me a brain!
Notice the traveling wave wrapping around the brain an integer number of times in each of these numerical solutions (source). The work by these labs is incredible, and they seem to show that the brain’s activity can be decomposed into each of these harmonics.
At the Psychedelic Science 2017 conference, Selen Atasoy explained that very low frequency harmonics were associated with Ego Dissolution in the trials that they studied. She also explained that emotional arousal, here defined as one’s overall level of energy in the emotional component (i.e. anxiety and ecstasy vs. depression and serenity), also correlated with low frequency harmonic states. On the other hand, high valence states were correlated with high frequency brain harmonics.
These empirical results are things that I claim we could have predicted with the symmetry theory of valence. I then thought to myself: let’s try to come up with other predictions. How should we consider the mixture of various harmonics, beyond merely their individual presence? How can we reconstruct valence from this novel data-structure for representing brain-states?
The Algorithm for Quantifying Bliss
Starting my reasoning from first principles (sourced from the Symmetry Theory of Valence), the natural way to take a data-structure that represents states of consciousness and recover its valence (in cases where samples occur across time in addition to space), is to try to isolate the noise, then proceed to quantify the dissonance, and what remains becomes what’s consonant. Basically, one will estimate the rough amount of symmetry (over time), as well as the degree of anti-symmetry, and the level of noise total.
In other words, I prophesize that we can get an “affective signature” of any brain state by applying an algorithm to fMRI brain recordings in order to estimate the degree of (1) consonance, (2) dissonance, and (3) noise within and across the brain’s natural harmonic states. This will result in what I call “Consonance-Dissonance-Noise Signatures” of brain states (“CDNS” for short) consisting of three histograms that describe the spectra of consonance, dissonance, and noise in a given moment of experience. The algorithm to arrive at a CDNS of a brain state is as follows:
Remove some of the noise in the brain state by applying the technique in Atasoy (2016) and recovering the distribution of the best approximation possible for the harmonics present (you may apply some further denoising on the harmonics when taken as a collective). Then estimate the total dissonance of the combination of harmonics by taking each pair of harmonics and quantifying their mutual dissonance. Finally, subtract the dissonance from “all of the interactions that could have existed” and what’s left ends up being the consonance. This way you obtain a Consonance, Dissonance, Noise Signature.
17
18
20
21. The Algorithm
Each of these three components will have their associated spectral power distribution. The noise spectrum is obtained during the first denoising step (as whatever cannot be explained by the harmonic decomposition). Then the dissonance spectrum is a function of the minimum power of pairs of harmonics that exist within the critical band of each other (see slides 18; possibly upgraded by 20), as well as the frequencies of the beating patterns.
Quantifying Dissonance?
In order to quantify dissonance we use a method that may end up being simpler than what you need to calculate dissonance for sound! E.g. in Quantifying the Consonance of Complex Tones With Missing Fundamentals (Chon 2008) we learn that the human auditory system may at times detect dissonance even when there is no actual dissonance in the input. That is, there are auditory illusions pertaining to valence and dissonance. Based on the missing fundamental one can create ghost dissonance between tones that are not even present. That said, quantifying dissonance in a brain in terms of its harmonic decomposition may be easier than quantifying dissonance in auditory input, precisely because the auditory input (and any sensory input for that matter) contains many intermediary pre-processing steps. The auditory system is relatively “direct” when compared to, e.g. the visual system, but you will still see some basic signal processing done to the input before it influences brain harmonics. The sensory systems, being adapted to meet the criteria of both interfacing with a functioning valence system and representing the information adequately (in terms of the real-world distribution of inputs) serve the function of translating the inputs into usable signals. I.e. frequency-based descriptions, often log-transformed, in order to arrive at valence gradients. For this reason, the algorithm that describes how to extract valence out of a brain state may turn out to be simpler than what you need to predict the hedonic quality of patterns of sound (or sight, touch, etc).
In brief, we propose that we can compute the approximate amount of dissonance between these harmonics by seeing how close they are in terms of spatial and temporal frequencies. If they are within the critical window then they will be considered as dissonant. There is likely to be a peak dissonance window, and when any pair of harmonic states live within that window, then experiencing both at once may feel really awful (to quantify such dissonance more precisely we would use a dissonance function as shown in Chon 2008). If indeed symmetry is intimately connected to valence, then highly anti-symmetrical states such as what’s produced by overlapping brain harmonics within the critical band may feel terrible. Remember, harmony is symmetry over time. So dissonance is anti-symmetry over time. It’s worth recalling, though, that in the absence of dissonance and noise, by default, what remains is consonance.
Visualizing Emotions as CDNS’s of States of Consciousness
Noise-dominant CDNS
Consonance-dominant CDNS
Dissonant-dominant CDNS
Above you can find two ways of visualizing a CDNS. Before we go on to the predictions, here we illustrate how we think that we will be able to seeat a glance the valence of a brain with our method. The big circle shows the dissonance and consonance for each of the brain harmonics (the black dots surrounding the circle represent the weights for each state). If you want the overall dissonance in a given state, you add up the red-yellow arrows, whereas if you want the total consonance, you add the purple-light-blue arrows. The triangles on the right expand upon the valence diagram presented in Principia Qualia. Namely, we have a blue (positive valence/consonant), red (negative valence/dissonant), and grey (neutral valence/noise) component in a state of consciousness. Each of these components has a spectrum; the myriad textures of emotional states are the result of different spectral signatures for hedonically loaded patterns.
Testable Predictions
We predict that intense emotions/experiences reported on psychedelics will result in states of consciousness whose harmonic decomposition will show a high amount of energy to be found in the pure harmonics (this was already found in 2017 as explained in the presentation, so let’s count that as a retrodiction). People who report being “very high” will have particularly high amounts of energy in their pure harmonics (as opposed to more noisy states).
The predicted valence for their experiences will be a function of the particular patterns (in terms of relative weights) of the various harmonics. Those which generate highly harmonic CDNS will be blessed with high valence experiences. And those who experience high dissonance, as empirically measured, will report negative feelings (e.g. fear, anxiety, nausea, weird and unpleasant body load, etc). In particular, we can explore the shape of highly harmonic states. In this framework, MDMA would be seen as likely to work by increasing the energy expressed by an exceptionally consonant set of harmonics in the brain.
A point to make here is that predicting “pure harmonics” on psychedelics (evidently simple and ordered patterns), would seem to go counter to the recently accrued empirical data concerning entropy in the tripping brain.** But we also know that the psychedelic brain can produce ridiculously self-similar near-informationless yet highly intense moments of experience preceded by a symmetrification process. Indeed, there are several symmetric attractors for the interplay of awareness and attention at various levels of “consciousness energy” and quality of mood. These states, in turn, not only are hedonically charged, but also allow the exploration of high-energy qualia research (since the implicit symmetry provides an energy seal). Highly energetic states of consciousness can be encapsulated in a highly symmetrical network of local binding. More about this in a future article.
On the other hand, we predict that people on SSRIs will show an enhanced amount of noise in their CDNS. A couple of slides back, this was represented as a higher loading of activity in the grey component of the triangular visualization of a CDNS. Likewise, some drugs will have various effects on the CDNS, such as stimulants inducing more consonance in high frequencies, whereas opioids and hypnotics having signatures of inducing high consonance in the low frequencies.
Summary of Predictions About Drug Effects
Psychedelic substances will increase the overall power of the brain’s pure harmonics, and thus result in a CDN Signature characterized by: (a) high consonance of all frequencies, (b) high dissonance of all frequencies, and (c) low noise of all frequencies. Criticality will be observed by way of the CDNS having high variance.
MDMA will produce a very specific range of states that have on the one hand very pure harmonic states of high frequencies, and on the other, very small collective dissonance and noise. In other words: (a) high amounts of high-frequency consonance, (b) low amounts of dissonance of all frequencies, and (c) low noise of all frequencies.
Any “affect blunting” agent such as SSRIs, ibuprofen, aspirin, acetaminophen, and agmatine, will produce CDNS characterized by: (a) reduced consonance of all frequencies, (b) reduced dissonance of all frequencies, and (c) increased noise in either some or all frequencies. We further hypothesize that different antidepressants (e.g. citalopram vs. fuoxetine) will look the same with respect to reducing the C and D components, but may have differences in the way they increase the N spectrum.
Opioids in euphoric doses will be found to (a) increase low frequency consonance, (b) decrease dissonance for all frequencies but especially the high frequencies, and (c) slightly increase noise across the board.
Stimulants will be found to (a) increase medium and high frequency consonance, (b) leave dissonance fairly unaltered, and (c) reduce noise for all frequencies but especially those in the upper end of the spectrum.
Predictions About Emotions
For now, here are the specific predictions concerning emotions that I am making:
The energy of the consonant (C) component of a CDNS will be highly correlated with the amount of euphoria (pleasure, happiness, positive feelings, etc.) a person is experiencing.
The energy of the dissonant (D) component will have a high correlation with the amount of dysphoria (pain, suffering, negative feelings, etc.) a person feels.
The energy of the noise (N) component will be correlated with flattened affect and blunted valence (i.e. feeling neither good nor bad, like there is a fog that masks all feelings).
If one creates a geometric representation of the relationships between various brain states using their respective CDNS similarities as a distance metric for emotional states using Multi-Dimensional Scaling (MDS) techniques, one will be able to recover a really good approximation of the empirically-derived dimensional models of emotions (cf. dimensional models of emotion; Wire-heading Done Right). In other words, if you ask your participants to tell you how they feel during the fMRI sessions and then associate those emotions to their instantaneous CDNS, and then you apply multidimensional scaling to the resulting CDNS, you will be able to recover a good dimensional picture of the state-space of emotions. I.e. “subjective similarity between emotions” will be closely tracked by the geometric distance between their corresponding CDNS:
Applying MDS scaling to the C component of the CDNS will result in a better characterization of the differences between positive emotions.
Applying MDS to the D component will result in a better characterization of the differences between negative emotions. And,
Applying MDS to the N component will result in a better characterization of the differences between valence-neutral emotions.
The Future of Mental Health
Sir, your 17th harmonic is really messing up the consonance of your 19th harmonic, and it interrupts the creative morning mood you recently enjoyed. I suggest taking 1mg of Coluracetam, listening to a selection of Diamond songs, and RD23 [stretching exercise]. Here’s your expected CDNS.
The “clinical phenomenologist” of the year 2050 might look into your brain harmonics, and try to find the shortest paths to nearby state-spaces with less chronic dissonance, fishing for high-consonance attractors with large basins to shoot for. The qualia expert would go on to provide you various options that may improve all sorts of metrics, including valence, the most important of them all. If you ask, your phenomenologist can give you trials for fully reversible treatments. You sample them in your own time, of course, and test them for a day or two before deciding whether to use these moods for longer.
Personalized Harmonic Retuning
I assume that people will be given just about enough retuning to get back to their daily routines as they themselves prefer them, but without any sort of nagging dissonance. Most people will probably continue on with their preference architectures relatively unchanged. Indeed, that will be a valued quality for a personalized harmonic retuning product. Having adequate mood devices that don’t mess up your existing value system might eventually become a highly understood, precision-engineered aspect of mainstream mental health. At least compared to the current (pre-psychedelic re-adoption 2017) paradigms. Arguably, even psychedelic therapy is pretty blunt in a way. Not in the sense of blunting the hedonic quality of your experience (on the contrary). But in the sense of applying the harmonization process indiscriminately.
For the psychonauts (hopefully they are not too rare by then), who still want to investigate consciousness even though human life is already full of love (in the future), we will have a different arrangement. They are free to explore themselves while being part of a research institute. Indeed, pursuing the purpose of understanding the big picture (including consciousness) will require the experimental method. More so, exploring the state-space of consciousness will, for the foreseeable future, be a way to find new ways of making others happy. People will continue to explore alien state-spaces in the search of highly-priced high-valence states. At least for some scores of generations valence engineering is bound to continue to be economically profitable. As we discover new drugs, new treatments, new philosophical trances, new interpretations and expressions of love, and so on, the economy will adapt to these inventions. We already live in an informational economy of states of consciousness, and the future is likely to be like that as well. Except that consciousness technologies will be immensely more powerful.
Barring the unlikely emergence of anti-hedonist Spartan self-punishing transhumanist social movements enabled with genetic technology, I don’t anticipate major obstacles in the eventual widespread use of mood organs. In fact, the wide adoption of SSRIs in some pockets of society shows that the general public is willing and interested in minor self-adjustments to deal with chronic negativity. Hedonic technology is in its early days, but with a root understanding of the nature of valence, the sky is the limit.
SSRIs have an overall effect of blunting one’s experience at pretty much every level imaginable. Usually just a little, enough to help people re-establish a new order between their harmonics, in a more noisy, less intense range of moods. Some people may benefit from this sort of intervention. Now, also it’s worth pointing out the possible side effects, which have the common theme of reducing the structural integrity of the micro-structure of consciousness. Thus, the highly ordered pleasant and unpleasant experiences get softened. Whether this generalized softening is beneficial depends on many factors. Psychonauts usually avoid them as much as possible in order to protect the psychoacoustical potential of their brain, were they to desire to use this potential sometime in the future.
17 wallpaper symmetry groups
Taken at Psychedelic Science 2017
Stimuli
Stimuli with tracers
Psychedelics, in this framework, would be interpreted as neuroacoustic enhancers. These agents trigger, via control interruption, a more “echo-ey acoustic environment for one’s consciousness”. Meaning, any qualia experienced under the influence lasts for longer (the decay of intensity of experience as a function of time since presentation of stimuli becomes a lot “slower” or “fatter”). On high doses, the intensity of each component of a cycle of an experience can feel just as intense, and thus one might find oneself unable to locate oneself in time. Sometimes intense feelings return cyclically, and ultimately at strong doses, experiential feedback dominates every aspect of one’s experience, and there isn’t anything other than standing waves of synesthetic psychedelic feelings.
Peak symmetry states with their associated valence would be predicted to be far more accessible on highly harmonic states of consciousness. So psychedelics and the like could be carefully used to explore the positive extreme of valence: Hyper-symmetrical states. That said, for responsible exploration, a euphoriant will be needed to prevent negative psychedelic experiences.
Final Thoughts
A Harmonic Society is a place where everyone recognizes what makes other sentient beings love life. It’s a place in which everyone deeply understands the valence landscapes of other beings. People in such a society would know that a zebra, an owl, and a salamander all share the pursuit of harmonic states of consciousness, albeit in their own, often different-looking, state-spaces of qualia. We would understand each other far more deeply if we saw each other’s valence landscapes as part of a big state-space of possible preference architectures. Ultimately, the pursuit of existential bliss and the ontological question (why being?) would incite us to explore each other through consciousness technologies. We will have an expanded state-space of available possible moods, both individual and collective, increasing our chances of finding a new revolutionary understanding of consciousness, identity, and what’s possible for post-hedonium societies.
**The Entropic Brain theory portrays psychedelia in terms of increased entropy, but also, and most importantly, focuses on criticality. Just thinking about entropy would not distinguish between adding white noise and adding interesting patterns. In other words, from the point of view of simple entropy without any spectral (or nonlinear) analysis, SSRIs and psychedelics are doing pretty much the same thing. So the sense of “entropy” that matters will have to be a lot more detailed, showing you in what way the information encoded in normal states of consciousness changes as a function of entropy added in various ways.
On psychedelics one does indeed find highly ordered crystal-like states of consciousness (which I’ve described elsewhere as peak symmetry states), and as far as we know those states are also some of the most positively hedonically charged. Hence, at least in terms of describing the quality of the psychedelic experience, leaving symmetry out would make us miss an important big-picture kind of quality for psychedelics in general and their connection to valence variance.
***→ see quote →
My hypothesis strongly implies that ‘hedonic’ brain regions influence mood by virtue of acting as ‘tuning knobs’ for symmetry/harmony in the brain’s consciousness centers. Likewise, nociceptors, and the brain regions which gate & interpret their signals, will be located at critical points in brain networks, able to cause large amounts of salience-inducing antisymmetry very efficiently. We should also expect rhythm to be a powerful tool for modeling brain dynamics involving valence- for instance, we should be able to extend (Safron 2016)’s model of rhythmic entrainment in orgasm to other sorts of pleasure.


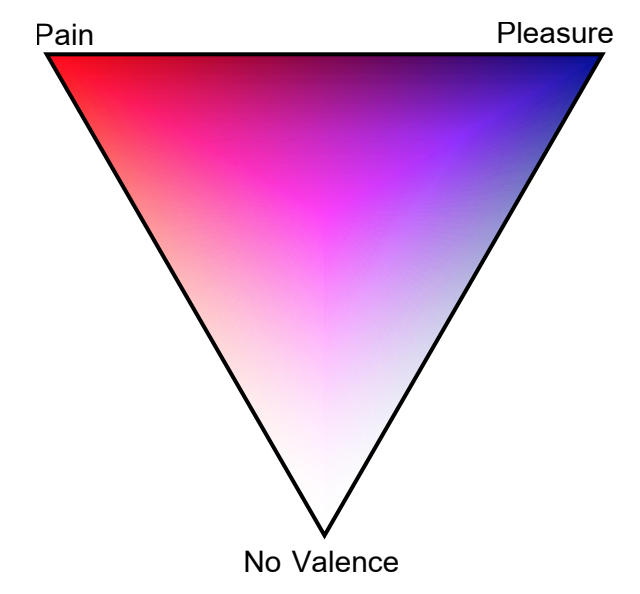




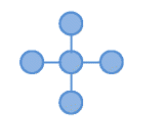
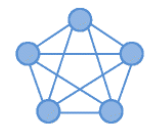































































")
")
")
")
")
")
")
")
")
")
")
")
")
")
")





")
")
")
")
")
")
")
")
")
")


")
")
")
")
")
")
")
")
")



")
")
")
")
{kind=link}
{kind=link}